2.2 Properties of Polynomial Functions and Their Graphs
2.2.1 Monomial Function
Definition 2.4
A monomial function is a function of the form
![\[ f(x) = b \qquad \text{or} \qquad f(x) = a x^{n},\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4064983730a31136dd5b6559fdd5091c_l3.png "Rendered by QuickLaTeX.com")
where  and
and  are real numbers,
are real numbers,  and
and  .
.
The domain of a monomial function is  .
.
Monomial functions, by definition, contain the constant functions along with a two parameter family of functions,  . We use
. We use  as the default independent variable here with and
as the default independent variable here with and  as parameters. From Section 0.1.1, we recall that the set
as parameters. From Section 0.1.1, we recall that the set  is the set of natural numbers, so examples of monomial functions include
is the set of natural numbers, so examples of monomial functions include  ,
,  , and
, and  . Note that the function
. Note that the function  is not a monomial function. Even though
is not a monomial function. Even though  for all nonzero values of ,
for all nonzero values of ,  is undefined,[1] and hence does not have a domain of .[2]
is undefined,[1] and hence does not have a domain of .[2]
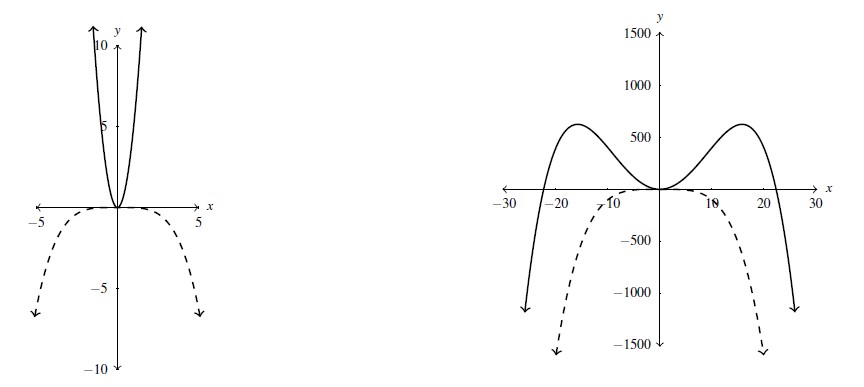
We begin our study of the graphs of polynomial functions by studying graphs of monomial functions. Starting with  where is even, we investigate the cases
where is even, we investigate the cases  ,
,  and
and  . Numerically, we see that if
. Numerically, we see that if  ,
,  becomes much smaller as increases whereas if
becomes much smaller as increases whereas if  or
or  , becomes much larger as increases. These trends manifest themselves geometrically as the graph `flattening’ for
, becomes much larger as increases. These trends manifest themselves geometrically as the graph `flattening’ for  and `narrowing’ for
and `narrowing’ for  as increases.[3]
as increases.[3]
![\[\begin{array}{|r||c|c|c|} \hline x & x^2 & x^4 & x^6 \\ \hline -2 & 4& 16& 64 \\ \hline -1 & 1 & 1& 1\\ \hline -0.5 & 0.25 & 0.0625& 0.015625 \\ \hline 0 & 0 & 0 & 0 \\ \hline 0.5 & 0.25 & 0.0625 & 0.015625 \\ \hline 1& 1 & 1& 1 \\ \hline 2 & 4 & 16 & 64 \\ \hline \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-cbafe3ca3efed1ddae328fdbce3e3322_l3.png "Rendered by QuickLaTeX.com")
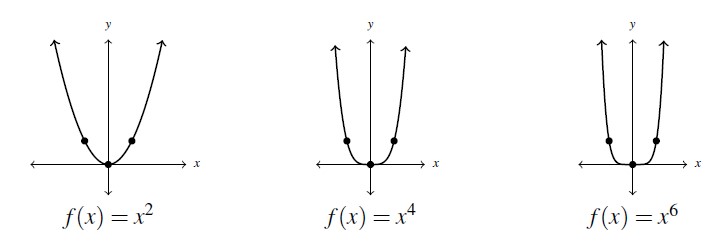
From the graphs, it appears as if the range of each of these functions is  . When is even,
. When is even,  for all so the range of
for all so the range of  is contained in . To show that the range of
is contained in . To show that the range of  is all of , we note that the equation
is all of , we note that the equation  for
for  has (at least) one solution for every even integer , namely
has (at least) one solution for every even integer , namely ![x = \sqrt[n]{c}](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-39a7a7808df4fc9607d0fe5acc1fcf55_l3.png "Rendered by QuickLaTeX.com") . (See Section 0.2 for a review of this notation.) Hence,
. (See Section 0.2 for a review of this notation.) Hence, ![f(\sqrt[n]{c}) = (\sqrt[n]{c})^n = c](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-1fc3088b412b20dc584641fc48644cbc_l3.png "Rendered by QuickLaTeX.com") which shows that every non-negative real number is in the range of .[4]
which shows that every non-negative real number is in the range of .[4]
Another item worthy of note is the symmetry about the line  a.k.a the
a.k.a the  -axis. (See Definition ?? for a review of this concept.) With being even,
-axis. (See Definition ?? for a review of this concept.) With being even,  . At the level of points, we have that for all ,
. At the level of points, we have that for all ,  . Hence for every point
. Hence for every point  on the graph of , the point symmetric about the -axis,
on the graph of , the point symmetric about the -axis,  is on the graph, too. We give this sort of symmetry a name honoring its roots here with even-powered monomial functions:
is on the graph, too. We give this sort of symmetry a name honoring its roots here with even-powered monomial functions:
Definition 2.5
A function is said to be even if  for all in the domain of .
for all in the domain of .
NOTE: A function is even if and only if the graph of  is symmetric about the -axis.
is symmetric about the -axis.
An investigation of the odd powered monomial functions ( ) yields similar results with the major difference being that when a negative number is raised to an odd natural number power the result is still negative. Numerically we see that for the values of
) yields similar results with the major difference being that when a negative number is raised to an odd natural number power the result is still negative. Numerically we see that for the values of  increase as increases and for
increase as increases and for  the values of get closer to
the values of get closer to  as increases. This translates graphically into a flattening behavior on the interval
as increases. This translates graphically into a flattening behavior on the interval  and a narrowing elsewhere. The graphs are shown below.
and a narrowing elsewhere. The graphs are shown below.
The range of these functions appear to be all real numbers, which is algebraically sound as the equation has a solution for every real number,[5] namely . Hence, for every real number  , choose so that
, choose so that ![f(x) = f(\sqrt[n]{c}) = (\sqrt[n]{c})^n =c](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-c6d6aa8ca84539a6c446ce353af03200_l3.png "Rendered by QuickLaTeX.com") . This shows that every real number is in the range of .
. This shows that every real number is in the range of .
![\[\begin{array}{|r||c|c|c|} \hline x & x^3 & x^5 & x^7 \\ \hline -2 & -8& -32& -128 \\ \hline -1 & -1 & -1& -1\\ \hline -0.5 & 0.125 & -0.03125& -0.0078125 \\ \hline 0 & 0 & 0 & 0 \\ \hline 0.5 & 0.125 & 0.03125 & 0.0078125 \\ \hline 1& 1 & 1& 1 \\ \hline 2 & 8 & 32 & 128 \\ \hline \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e34021d8cb5e182443beef0513d58ba3_l3.png "Rendered by QuickLaTeX.com")
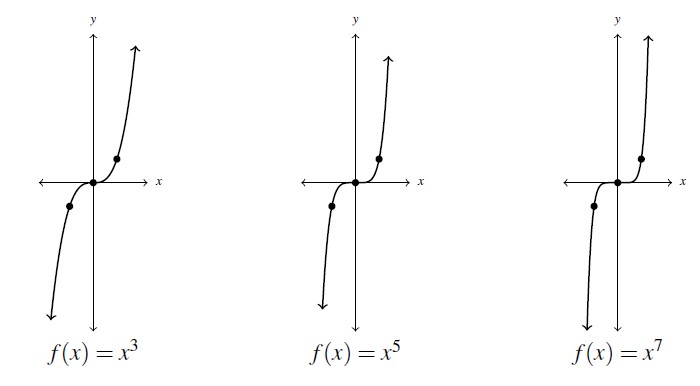
Here, as a result of being odd,  . This means that whenever is on the graph, so is the point symmetric about the origin,
. This means that whenever is on the graph, so is the point symmetric about the origin,  . (Again, see Definition 1.1.) We generalize this property below. Not surprisingly, we name it in honor of its odd powered heritage:
. (Again, see Definition 1.1.) We generalize this property below. Not surprisingly, we name it in honor of its odd powered heritage:
Definition 2.6
A function is said to be odd if  for all in the domain of .
for all in the domain of .
NOTE: A function is odd if and only if the graph of is symmetric about the origin.
The most important thing to take from the discussion above is the basic shape and common points on the graphs of  for each of the families when even and is odd. While symmetry is nice and should be noted when present, even and odd symmetry are comparatively rare. The point of Definitions 2.5 and 2.6 is to give us the vocabulary to point out the symmetry when appropriate.
for each of the families when even and is odd. While symmetry is nice and should be noted when present, even and odd symmetry are comparatively rare. The point of Definitions 2.5 and 2.6 is to give us the vocabulary to point out the symmetry when appropriate.
Moving on, we take a cue from Theorem 1.4 and prove the following.
Theorem 2.2
For real numbers ,  and
and  with , the graph of
with , the graph of  can be obtained from the graph of by performing the following operations, in sequence:
can be obtained from the graph of by performing the following operations, in sequence:
- add to the -coordinates of each of the points on the graph of . This results in a horizontal shift to the right if
 or left if
or left if  .
.
NOTE: This transforms the graph of to  .
. - multiply the -coordinates of each of the points on the graph obtained in Step 1 by . This results in a vertical scaling, but may also include a reflection about the -axis if
 .
.
NOTE: This transforms the graph of to  .
. - add to the -coordinates of each of the points on the graph obtained in Step 2. This results in a vertical shift up if
 or down if
or down if  .
.
NOTE: This transforms the graph of to 
Proof. Our goal is to start with the graph of and build it up to the graph of . We begin by examining  . The graph of can be described as the set of points
. The graph of can be described as the set of points  .[6] Likewise, the graph of
.[6] Likewise, the graph of  can be described as the set of points
can be described as the set of points  . If we re-label
. If we re-label  so that
so that  , then as varies through all real numbers so does .[7] Hence, we can describe the graph of as
, then as varies through all real numbers so does .[7] Hence, we can describe the graph of as  . This means that we can obtain the graph of from the graph of by adding to each of the -coordinates of the points on the graph of and that establishes the first step of the theorem.
. This means that we can obtain the graph of from the graph of by adding to each of the -coordinates of the points on the graph of and that establishes the first step of the theorem.
Next, we consider the graph of  as compared to the graph of . The graph of is the set of points
as compared to the graph of . The graph of is the set of points  while the graph of
while the graph of  is the set of points
is the set of points  . The only difference between the points
. The only difference between the points  and
and  is that the -coordinate in the latter is times the -coordinate of the former.
is that the -coordinate in the latter is times the -coordinate of the former.
In other words, to produce the graph of from the graph of , we take the -coordinate of each point on the graph of and multiply it by to get the corresponding point on the graph of . If  , all we are doing is scaling the -axis by . If
, all we are doing is scaling the -axis by . If  , then, in addition to scaling the -axis, we are also reflecting each point across the -axis. In either case, we have established the second step of the theorem.
, then, in addition to scaling the -axis, we are also reflecting each point across the -axis. In either case, we have established the second step of the theorem.
Last, we compare the graph of  to that of . Once again, we view the graphs as sets of points in the plane. The graph of is and the graph of
to that of . Once again, we view the graphs as sets of points in the plane. The graph of is and the graph of  is
is . Looking at the corresponding points, and
. Looking at the corresponding points, and  , we see that we can obtain all of the points on the graph of by adding to each of the -coordinates to points on the graph of . This is equivalent to shifting every point vertically by units which establishes the third and final step in the theorem.
, we see that we can obtain all of the points on the graph of by adding to each of the -coordinates to points on the graph of . This is equivalent to shifting every point vertically by units which establishes the third and final step in the theorem. 
This argument should sound familiar. The proof we presented above is more-or-less the same argument we presented after the proof of Theorem 1.4 in Section 1.4 but with ` ‘ replaced by `
‘ replaced by ` .’ Also note that using
.’ Also note that using  in Theorem 2.2 establishes Theorem 2.1 in Section 2.1.
in Theorem 2.2 establishes Theorem 2.1 in Section 2.1.
We now use Theorem 2.2 to graph two different “transformed” monomial functions. To provide the reader an opportunity to compare and contrast the graphical behaviors exhibited in the case when is even versus when is odd, we graph one of each case.
Example 2.2.1
Example 2.2.1.1
Use Theorem 2.2 to graph the following functions. Label at least three points on each graph. State the domain and range using interval notation.

Solution:
Graph  .
.
For  , we identify
, we identify  ,
,  ,
,  , and
, and  . Thus to graph , we start with
. Thus to graph , we start with  and perform the following steps, in sequence, tracking the points
and perform the following steps, in sequence, tracking the points  ,
,  and
and  through each step:
through each step:
Step 1: add  to the -coordinates of each of the points on the graph of
to the -coordinates of each of the points on the graph of  :
:

Step 2: multiply the -coordinates of each of the points on the graph of  by
by  :
:

Step 3: add  to the -coordinates of each of the points on the graph of
to the -coordinates of each of the points on the graph of  :
:

The domain here is , while the range is ![(-\infty, 3]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-3026892f9cf1442ab37da3e178e61a3e_l3.png "Rendered by QuickLaTeX.com") .
.
Example 2.2.1.2
Use Theorem 2.2 to graph the following functions. Label at least three points on each graph. State the domain and range using interval notation.

Solution:
Graph  .
.
To use Theorem 2.2 to graph , we must first rewrite the expression for  :
:
![\[ \begin{array}{rcl} g(t) &=& \dfrac{(2t-1)^3}{5} \\[8pt] &=& \frac{1}{5} \left( 2 \left(t - \frac{1}{2} \right) \right)^3 \\[8pt] &=& \frac{1}{5} (2)^3 \left( t - \frac{1}{2} \right)^3 \\[8pt] &=& \frac{8}{5} \left( t - \frac{1}{2} \right)^3 \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-820bfc326ca416aa3c4b040413db3948_l3.png "Rendered by QuickLaTeX.com")
We identify  ,
,  and
and  . Hence, we start with the graph of
. Hence, we start with the graph of  and perform the following steps, in sequence, tracking the points
and perform the following steps, in sequence, tracking the points  , and through each step:
, and through each step:
Step 1: add  to each of the
to each of the  -coordinates of each of the points on the graph of
-coordinates of each of the points on the graph of  :
:

Step 2: multiply each of the -coordinates of the graph of  by
by  .
.

Both the domain and range of  is .
is .
Example 2.2.1 demonstrates two big ideas in mathematics: first, resolving a complex problem into smaller, simpler steps, and, second, the value of changing form.
Next we wish to focus on the so-called end behavior presented in each case.[8] The end behavior of a function is a way to describe what is happening to the outputs from a function as the inputs approach the `ends’ of the domain. Due to the fact that the domain of monomial functions is , we are looking to see what these functions do as their inputs `approach’  . The best we can do is sample inputs and outputs and infer general behavior from these observations.\footnote{and let Calculus students prove our claims.} The good news is we’ve wrestled with this concept before. Indeed, every time we add `arrows’ to the graph of a function, we’ve indicated its end behavior. Let’s revisit the graph of
. The best we can do is sample inputs and outputs and infer general behavior from these observations.\footnote{and let Calculus students prove our claims.} The good news is we’ve wrestled with this concept before. Indeed, every time we add `arrows’ to the graph of a function, we’ve indicated its end behavior. Let’s revisit the graph of  using the table below.
using the table below.
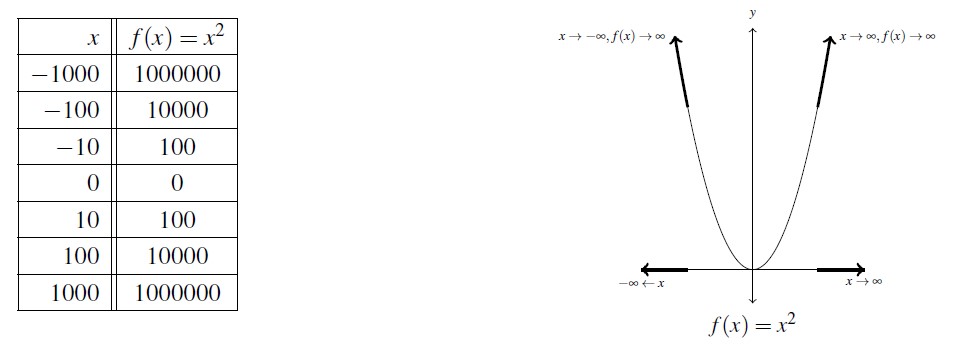
As takes on smaller and smaller values,[9], we see  takes on larger and larger positive values. The smaller we use, the larger the becomes, seemingly without bound.[10] We codify this behavior by writing as
takes on larger and larger positive values. The smaller we use, the larger the becomes, seemingly without bound.[10] We codify this behavior by writing as  ,
,  . Graphically, the farther to the left we travel on the -axis, the farther up the -axis the function values travel. This is why we use an `arrow’ on the graph in Quadrant II heading upwards to the left. Similarly, we write as
. Graphically, the farther to the left we travel on the -axis, the farther up the -axis the function values travel. This is why we use an `arrow’ on the graph in Quadrant II heading upwards to the left. Similarly, we write as  , because as the values increase, so do the values – seemingly without bound. Graphically we indicate this by an arrow on the graph in Quadrant I heading upwards to the right. This behavior holds for all functions where
, because as the values increase, so do the values – seemingly without bound. Graphically we indicate this by an arrow on the graph in Quadrant I heading upwards to the right. This behavior holds for all functions where  is even.
is even.
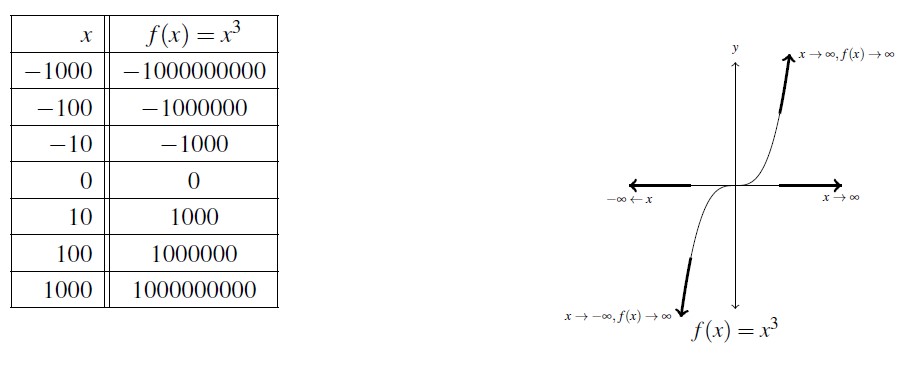
Repeating this investigation for  , we find as , becomes unbounded in the negative direction, so we write
, we find as , becomes unbounded in the negative direction, so we write  . As , becomes unbounded in the positive direction, so we write . This trend holds for all functions where is odd.
. As , becomes unbounded in the positive direction, so we write . This trend holds for all functions where is odd.
Theorem 2.3 summarizes the end behavior of monomial functions. The results are a consequence of Theorem 2.2 in that the end behavior of a function of the form  only differs from that of if there is a reflection, that is, if .
only differs from that of if there is a reflection, that is, if .
Theorem 2.3 End Behavior of Monomial Functions
Suppose  where is a real number and .
where is a real number and .
- If is even:


- If is odd:


2.2.2 Polynomial Functions
We are now in the position to discuss polynomial functions. Simply stated, polynomial functions are sums of monomial functions. The challenge becomes how to describe one of these beasts in general. Up until now, we have used distinct letters to indicate different parameters in our definitions of function families. In other words, we define constant functions as  , linear functions as
, linear functions as  , and quadratic functions as
, and quadratic functions as  . We even hinted at a function of the form
. We even hinted at a function of the form  . What happens if we wanted to describe a generic polynomial that required, say, 117 different parameters? Our work around is to use subscripted parameters,
. What happens if we wanted to describe a generic polynomial that required, say, 117 different parameters? Our work around is to use subscripted parameters,  , that denote the coefficient of
, that denote the coefficient of  . For example, instead of writing a quadratic as , we describe it as
. For example, instead of writing a quadratic as , we describe it as  , where
, where  ,
,  , and
, and  are real numbers and
are real numbers and  . As an added example, consider
. As an added example, consider  . We can re-write the formula for as
. We can re-write the formula for as  and identify
and identify  ,
,  ,
,  ,
,  ,
,  and
and  . This is the notation we use in the following definition.
. This is the notation we use in the following definition.
Definition 2.7
A polynomial function is a function of the form
![\[ f(x) = a_{n} x^{n} + a_{n-1} x^{n-1} + \ldots + a_{2} x^{2} + a_{1} x + a_{0},\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-9e857bfac36afd5bdb3ccf91b6274f68_l3.png "Rendered by QuickLaTeX.com")
where , ,  ,
,  are real numbers and
are real numbers and 
The domain of a polynomial function is 
As usual, is used in Definition 2.7 as the independent variable with the each being a parameter. Even though we specify so  , the value of the are unrestricted. Hence, any constant function can be written as
, the value of the are unrestricted. Hence, any constant function can be written as  , and so they are polynomials. Polynomials have an associated vocabulary, and hence, so do polynomial functions.
, and so they are polynomials. Polynomials have an associated vocabulary, and hence, so do polynomial functions.
Definition 2.8
- Given
 with and
with and  , we say
, we say
- The natural number is called the degree of the polynomial .
- The term
 is called the leading term of the polynomial .
is called the leading term of the polynomial . - The real number is called the leading coefficient of the polynomial .
- The real number is called the constant term of the polynomial .
- The natural number
- If
 , and
, and  , we say has degree
, we say has degree 
- If
 , we say has no degree.[11]
, we say has no degree.[11]
Again, constant functions are split off in their own separate case Definition 2.8 because of the ambiguity of  . (See the remarks following Definition 2.4.) A consequence of Definition 2.8 is that we can now think of nonzero constant functions as `zeroth’ degree polynomial functions, linear functions as `first’ degree polynomial functions, and quadratic functions as `second’ degree polynomial functions.
. (See the remarks following Definition 2.4.) A consequence of Definition 2.8 is that we can now think of nonzero constant functions as `zeroth’ degree polynomial functions, linear functions as `first’ degree polynomial functions, and quadratic functions as `second’ degree polynomial functions.
Example 2.2.2
Example 2.2.2.1
Determine the degree, leading term, leading coefficient and constant term of the following polynomial functions.
Solution:
Determine the degree, leading term, leading coefficient and constant term of .
There are no surprises with . It is written in the form of Definition 2.8, and we see that
the degree is  ,
,
the leading term is  ,
,
the leading coefficient is , and
the constant term is  .
.
Example 2.2.2.2
Determine the degree, leading term, leading coefficient and constant term of the following polynomial functions.

Solution:
Determine the degree, leading term, leading coefficient and constant term of .
Two changes here: first, the independent variable is , not . Second, the form given in Definition 2.8 specifies the function be written in descending order of the powers of , or in this case, . To that end, we re-write  and see that
and see that
the degree of is ,
the leading term is  ,
,
the leading coefficient is , and
the constant term is .
Example 2.2.2.3
Determine the degree, leading term, leading coefficient and constant term of the following polynomial functions.

Solution:
Determine the degree, leading term, leading coefficient and constant term of 
We need to rewrite the formula for  so that it resembles the form given in Definition 2.8:
so that it resembles the form given in Definition 2.8:
![\[ \begin{array}{rcl} H(w) &=& \frac{4-w}{5} \\ &=& \frac{4}{5} - \frac{w}{5} \\ &=& -\frac{1}{5} w + \frac{4}{5} \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e8f42fe0bf23e16fbbd2114a809a8b5c_l3.png "Rendered by QuickLaTeX.com")
We see
the degree of  is
is  ,
,
the leading term is  ,
,
the leading coefficient is  , and
, and
the constant term is 
Example 2.2.2.4
Determine the degree, leading term, leading coefficient and constant term of the following polynomial functions.

Solution:
Determine the degree, leading term, leading coefficient and constant term of 
It may seem that we have some work ahead of us to get  in the form of Definition 2.8. However, it is possible to glean the information requested about without multiplying out the entire expression
in the form of Definition 2.8. However, it is possible to glean the information requested about without multiplying out the entire expression  The leading term of will be the term which has the highest power of
The leading term of will be the term which has the highest power of  . The way to get this term is to multiply the terms with the highest power of from each factor together – in other words, the leading term of
. The way to get this term is to multiply the terms with the highest power of from each factor together – in other words, the leading term of  is the product of the leading terms of the factors of
is the product of the leading terms of the factors of  Hence, the leading term of is
Hence, the leading term of is 
This means that the degree of is and the leading coefficient is 
As for the constant term, we can perform a similar operation. The constant term of is obtained by multiplying the constant terms from each of the factor: 
We now turn our attention to graphs of polynomial functions. As polynomial functions are sums of monomial functions, it stands to reason that some of the properties of those graphs carry over to more general polynomials. We first discuss end behavior. Consider  . Below are two graphs of (solid line) along with the graphs of its leading term,
. Below are two graphs of (solid line) along with the graphs of its leading term,  (dashed line.) On the left is a view `near’ the origin, while on the right is a `zoomed out’ view. Near the origin, the graphs have little in common, but as we look farther out, it becomes that the functions begin to look quite similar.
(dashed line.) On the left is a view `near’ the origin, while on the right is a `zoomed out’ view. Near the origin, the graphs have little in common, but as we look farther out, it becomes that the functions begin to look quite similar.
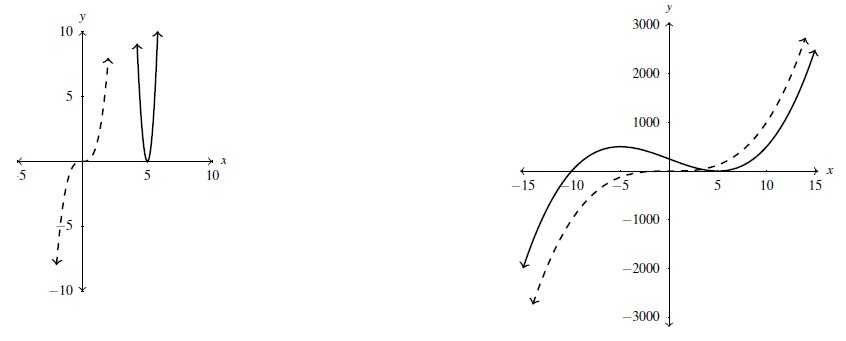
This observation is borne out numerically as well. Based on the table below, as  , it certainly appears as if
, it certainly appears as if  . One way to think about what is happening numerically is that the leading term
. One way to think about what is happening numerically is that the leading term  dominates the lower order terms
dominates the lower order terms  and
and  as . In other words, grows so much faster than
as . In other words, grows so much faster than  and that these `lower order terms’ don’t contribute anything of significance to the so
and that these `lower order terms’ don’t contribute anything of significance to the so  . Another way to see this is to rewrite as[12]
. Another way to see this is to rewrite as[12]
![\[\begin{array}{rcl} f(x) &=& x^3 - 75x + 250 \\[10pt] &=& x^3 \left(1 - \frac{75}{x^2} + \frac{250}{x^3} \right) \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-98c7a7ee3395b0f60a1ee397ed611f3d_l3.png "Rendered by QuickLaTeX.com")
As , both  and
and  have constant numerators but denominators that are becoming unbounded. As such, both and
have constant numerators but denominators that are becoming unbounded. As such, both and  . Therefore, as ,
. Therefore, as ,
![\[ \begin{array}{rcl} f(x) &=& x^3 - 75x+250 \\[10pt] &=& x^3 \left(1 - \frac{75}{x^2} + \frac{250}{x^3} \right) \\[10pt] &\approx& x^3 (1 + 0 + 0) = x^3 \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-fc7789d8c04bfa1136bec04ab16d93c9_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{array}{|r||c|c|c|c|c|c|} \hline x & f(x) = x^3 -75x+250 & x^3 & -75 x & 250 & \frac{75}{x^2} & \frac{250}{x^3} \\ \hline -1000 & \approx -1 \times 10^9 & -1 \times 10^9 &75000 & 250 & 7.5 \times 10^{-5} & -2.5 \times 10^{-7} \\ \hline -100 & \approx -9.9 \times 10^5 & -1 \times 10^6 & 7500 & 250 & 0.0075 & -2.5 \times 10^{-4} \\ \hline -10 & 0 & -1000 & 750 & 250 & 0.75 & -0.25\\ \hline 10 & 500 & 1000 & -750 & 250 & 0.75 & 0.25 \\ \hline 100 &\approx 9.9 \times 10^5 & 1 \times 10^6 & -7500 & 250 & 0.0075 & 2.5 \times 10^{-4} \\ \hline 1000 & \approx 1 \times 10^9 & 1 \times 10^9 & -75000 & 250 & 7.5 \times 10^{-5} & 2.5 \times 10^{-7} \\ \hline \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-57ef81ae0859550bdbf7b19a450975d9_l3.png "Rendered by QuickLaTeX.com")
Next, consider  . Following the logic of the above example, we would expect the end behavior of
. Following the logic of the above example, we would expect the end behavior of  to mimic that of
to mimic that of  . When we graph
. When we graph  (solid line) on the same set of axes as
(solid line) on the same set of axes as  (dashed line), a view near the origin seems to suggest the exact opposite. However, zooming out reveals that the two graphs do share the same end behavior.[13]
(dashed line), a view near the origin seems to suggest the exact opposite. However, zooming out reveals that the two graphs do share the same end behavior.[13]
Algebraically, for , even with the small coefficient of  ,
,  dominates the
dominates the  term so
term so  . More precisely,
. More precisely,
![\[ \begin{array}{rcl} g(x) &=& -0.01x^4+5x^2 \\[10pt] &=& x^4 \left(-0.01 + \frac{5}{x^2} \right)\\[10pt] &\approx& x^4(-0.01 + 0) \\[10pt] &=& -0.01x^4 \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-cc8f12716d5ae8d6f27fa29edf1297f1_l3.png "Rendered by QuickLaTeX.com")
The results of these last two examples are generalized below in Theorem 2.4.
Theorem 2.4 End Behavior for Polynomial Functions
The end behavior of polynomial function with matches the end behavior of  .
.
That is, the end behavior of a polynomial function is determined by its leading term.
We argue Theorem 2.4 using an argument similar to ones used above. As ,
![\[ \begin{array}{rcl} f(x) &=& x^{n} \left( a_{n} +\dfrac{a_{n-1}}{x}+ \ldots + \dfrac{a_{2}}{x^{n-2}} + \dfrac{a_{1}}{x^{n-1}}+\dfrac{a_{0}}{x^{n}}\right) \\[10pt] &\approx& x^n( a_{n} + 0 +\ldots 0) \\[8pt] &=& a_{n} x^n \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d2ecbc249ab2f7588b3dba7181531197_l3.png "Rendered by QuickLaTeX.com")
If this argument looks a little fuzzy, it should. In Calculus, we have the tools necessary to more explicitly state what we mean by  . For now, we’ll rely on number sense and algebraic intuition.[14]
. For now, we’ll rely on number sense and algebraic intuition.[14]
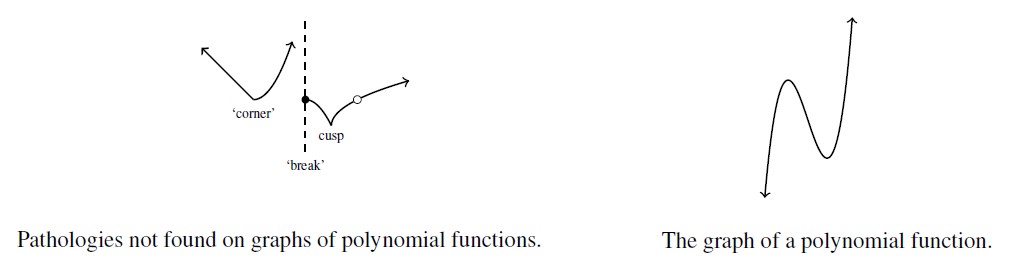
Now that we know how to determine the end behavior of polynomial functions, it’s time to investigate what happens `in between’ the ends. First and foremost, polynomial functions are continuous. Recall from Section 2.1 that, informally, graphs of continuous functions have no `breaks’ or `holes’ in them.[15] Monomial functions are continuous (as far as we can tell) and polynomials are sums of monomial functions, so we conclude that polynomial functions are continuous as well. Moreover, the graphs of monomial functions, hence polynomial functions, are smooth. Once again, `smoothness’ is a concept defined precisely in Calculus, but for us, functions have no `corners’ or `sharp turns’. Below we find the graph of a function which is neither smooth nor continuous, and to its right we have a graph of a polynomial, for comparison. The function whose graph appears on the left fails to be continuous where it has a `break’ or `hole’ in the graph; everywhere else, the function is continuous. The function is continuous at the `corner’ and the `cusp’, but we consider these `sharp turns’, so these are places where the function fails to be smooth. Apart from these four places, the function is smooth and continuous. Polynomial functions are smooth and continuous everywhere, as exhibited in the graph on the right. The notion of smoothness is what tells us graphically that, for example,  , whose graph is the characteristic `
, whose graph is the characteristic ` ‘ shape, cannot be a polynomial function, even though it is a piecewise-defined function comprised of polynomial functions. Knowing polynomial functions are continuous and smooth gives us an idea of how to `connect the dots’ when sketching the graph from points that we’re able to find analytically such as intercepts.
‘ shape, cannot be a polynomial function, even though it is a piecewise-defined function comprised of polynomial functions. Knowing polynomial functions are continuous and smooth gives us an idea of how to `connect the dots’ when sketching the graph from points that we’re able to find analytically such as intercepts.
Speaking of intercepts, we next focus our attention on the behavior of the graphs of polynomial functions near their zeros. Recall a zero of a function is a solution to . Geometrically, the zeros of a function are the -coordinates of the -intercepts of the graph of .
Consider the polynomial function  .
.
To find the zeros of , we set  . The expression is already factored, so we set each factor equal to zero.[16]
. The expression is already factored, so we set each factor equal to zero.[16]
Solving  gives
gives  ,
,  gives
gives  , and
, and  gives
gives  . Hence, our zeros are , , and .
. Hence, our zeros are , , and .
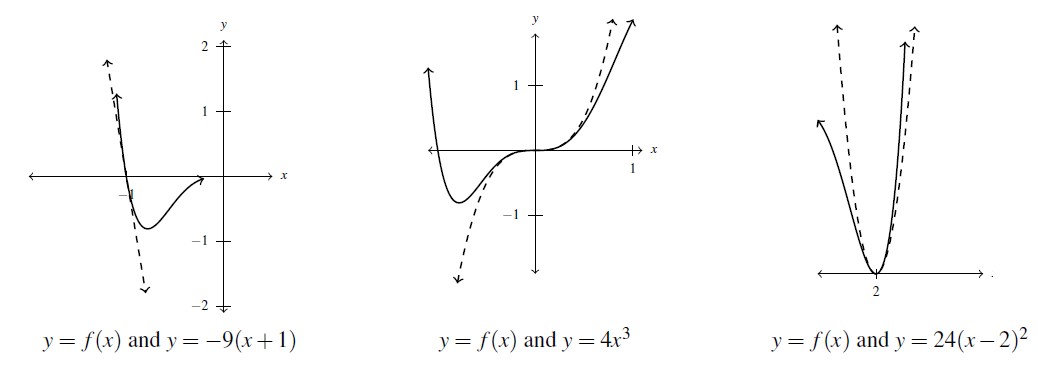
Below, we graph and observe the -intercepts  , and
, and  . We first note that the graph crosses through the -axis at and , but the graph touches and rebounds at . Moreover, at , the graph crosses through the axis is a fairly `linear’ fashion whereas there is a substantial amount of `flattening’ going on near . Our aim is to explain these observations and generalize them.
. We first note that the graph crosses through the -axis at and , but the graph touches and rebounds at . Moreover, at , the graph crosses through the axis is a fairly `linear’ fashion whereas there is a substantial amount of `flattening’ going on near . Our aim is to explain these observations and generalize them.
First, let’s look at what’s happening with the formula when  . We know the -intercept at is due to the presence of the
. We know the -intercept at is due to the presence of the  factor in the expression for . So, in this sense, the factor is determining a major piece of the behavior of the graph near . For that reason, we focus instead on the other two factors to see what contribution they make. We find when ,
factor in the expression for . So, in this sense, the factor is determining a major piece of the behavior of the graph near . For that reason, we focus instead on the other two factors to see what contribution they make. We find when ,  and
and  .
.
Hence,
![\[ \begin{array}{rcl} f(x) &=& x^3 (x-2)^2 (x+1) \\ &\approx& (-1)^3 (-1-2)^2 (x+1)\\ &=& -9(x+1) \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-1dd39717c944ee730f5eaa3ae6fc07c0_l3.png "Rendered by QuickLaTeX.com")
Below on the left is a graph of (the solid line) and the graph of  (the dashed line.) Sure enough, these graphs approximate one another near .
(the dashed line.) Sure enough, these graphs approximate one another near .
Likewise, let’s look near . The -intercept is a result of the factor. For  ,
,  and
and  , so
, so
![\[ \begin{array}{rcl} f(x) &=& x^3 (x-2)^2 (x+1)\\ &\approx& x^3 (-2)^2(1) \\ &=& 4x^3 \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-5aeb6351488f1f6204cf12bab72142c8_l3.png "Rendered by QuickLaTeX.com")
Below in the center picture, we have the graph of (again, the solid line) and  (the dashed line) near
(the dashed line) near  . Once again, the graphs verify our analysis.
. Once again, the graphs verify our analysis.
Last, but not least, we analyze near . Here, the intercept is due to the  factor, so we look at the and factors. If
factor, so we look at the and factors. If  ,
,  and
and  . Hence,
. Hence,
![\[ \begin{array}{rcl} f(x) &=& x^3 (x-2)^2 (x+1) \\ &\approx& (2)^3 (x-2)^2 (2+1) \\ &=& 24(x-2)^2 \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-86efa81cabf50265c2bf52d118db9d4f_l3.png "Rendered by QuickLaTeX.com")
Sure enough, as evidenced below on the right, the graphs of and  .
.
We generalize our observations in Theorem 2.5 below. Like many things we’ve seen in this text, a more precise statement and proof can be found in a course on Calculus.
Theorem 2.5
Suppose is a polynomial function and  where
where  and
and  . Then the the graph of near
. Then the the graph of near  resembles that of
resembles that of  .
.
Let’s see how Theorem 2.5 applies to our findings regarding 
For  ,
,  . We rewrite
. We rewrite ![f(x) = x^3 (x-2)^2 (x+1) = (x-(-1))^1 \left[x^3(x-2)^2\right]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-bc976d1d9859cd42cf287753317e03bd_l3.png "Rendered by QuickLaTeX.com") and identify
and identify  and
and  . We find
. We find  so Theorem 2.5 says that near , the graph of
so Theorem 2.5 says that near , the graph of  resembles
resembles  .
.
For  ,
,  and we can rewrite
and we can rewrite ![f(x) = x^3 (x-2)^2 (x+1) = (x-0)^3 \left[(x-2)^2 (x+1)\right] .](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b9075bce68f77993249b5ef4f0c447c5_l3.png "Rendered by QuickLaTeX.com") We identify
We identify  and
and  . In this case
. In this case  , so Theorem 2.5 guarantees the graph of near resembles
, so Theorem 2.5 guarantees the graph of near resembles 
Lastly, for  , we see
, we see ![f(x) = (x-2)^2 \left[x^3 (x+1)\right]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a482ca0fb7538b16b9dbf06c9205b7a1_l3.png "Rendered by QuickLaTeX.com") and we identify
and we identify  and
and  . We find
. We find  , so Theorem 2.5 guarantees the graph of resembles near
, so Theorem 2.5 guarantees the graph of resembles near  .
.
As we already mentioned, the formal statement and proof of Theorem 2.5 require Calculus. For now, we can understand the theorem as follows. If we factor a polynomial function as where  , then
, then  is a zero of , because
is a zero of , because  . The stipulation that means that we have essentially factored the expression
. The stipulation that means that we have essentially factored the expression  . Thinking back to Theorem 2.2, the graph has an -intercept at , a basic overall shape determined by the exponent
. Thinking back to Theorem 2.2, the graph has an -intercept at , a basic overall shape determined by the exponent  , and end behavior determined by the sign of
, and end behavior determined by the sign of  . The fact that if is a zero then we are guaranteed we can factor were and, moreover, such a factorization is unique (so that there’s only one value of possible for each zero) is a consequence of two theorems, Theorem 2.8 and The Factor Theorem, Theorem 2.10 which we’ll review in the next section. For now, we assume such a factorization is unique in order to define the following.
. The fact that if is a zero then we are guaranteed we can factor were and, moreover, such a factorization is unique (so that there’s only one value of possible for each zero) is a consequence of two theorems, Theorem 2.8 and The Factor Theorem, Theorem 2.10 which we’ll review in the next section. For now, we assume such a factorization is unique in order to define the following.
Definition 2.9
Suppose is a polynomial function and . If where , we say is a zero of multiplicity .
So, for  , is a zero of multiplicity , is a zero of multiplicity
, is a zero of multiplicity , is a zero of multiplicity  , and
, and  is a zero of multiplicity . Theorems 2.4 and 2.5 give us the following:
is a zero of multiplicity . Theorems 2.4 and 2.5 give us the following:
Theorem 2.6 The Role of Multiplicity
Suppose is a polynomial function and is a zero of multiplicity .
- If is even, the graph of touches and rebounds from the -axis at .
- If is odd, the graph of crosses through the -axis at .
Steps for Constructing a Sign Diagram for a Polynomial Function
Suppose is a polynomial function.
- Compute the zeros of and place them on the number line with the number above them.
- Choose a real number, called a test value, in each of the intervals determined in step 1.
- Determine and record the sign of for each test value in step 2.
Theorem 2.7
Suppose is a polynomial of degree . Then has at most real zeros, counting multiplicities.
Connections Between Zeros, Factors and Graphs of Polynomial Functions
Suppose is a polynomial function of degree . The following statements are equivalent:
- The real number is a zero of

 is a solution to the polynomial equation
is a solution to the polynomial equation 
 is a factor of
is a factor of 
- The point
 is an -intercept of the graph of
is an -intercept of the graph of 
Our next example showcases how all of the above theories can assist in sketching relatively good graphs of polynomial functions without the assistance of technology.
Example 2.2.3
Example 2.2.3.1
Let  . Compute all real zeros of and state their multiplicities.
. Compute all real zeros of and state their multiplicities.
Solution:
Compute all real zeros of and state their multiplicities.
To find the zeros of , we set  . The expression is already (partially) factored, so we set each factor equal to and solve.
. The expression is already (partially) factored, so we set each factor equal to and solve.
From  , we get
, we get  ;
;
from  we get ; and
we get ; and
from solving  we get
we get  .
.
Hence, the zeros are ,  , and
, and  .
.
In order to determine the multiplicities, we need to factor as so we can identify the and  as described in Definition 2.9.
as described in Definition 2.9.
The zero corresponds to the factor . Notice, however, that writing ![p(x) = (x+1)^1 \left[(2x-1)(1-x^4)\right]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-7035cd45ba265cf9924fade6e5eceb5a_l3.png "Rendered by QuickLaTeX.com") with
with  and
and  does not satisfy Definition 2.9 because,
does not satisfy Definition 2.9 because,  . Indeed, we can factor
. Indeed, we can factor  so that
so that
![\[ \begin{array}{rcl} p(x) &=& (2x-1)(x+1)(1-x^4)\\ &=& (2x-1)(x+1)(1-x)(1+x)(x^2+1)\\ &=& (x+1)^2 \left[(2x-1)(1-x)(x^2+1) \right] \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f2a1f22e5f9d411bc55ea84ce43a6dad_l3.png "Rendered by QuickLaTeX.com")
Identifying  , we find
, we find  , which means the multiplicity of
, which means the multiplicity of  is
is  .
.
The zero came from the factor  , so we have
, so we have
![\[ \begin{array}{rcl} p(x) &=& (2x-1)(x+1)^2(1-x)(x^2+1) \\ &=& (x -\frac{1}{2})^{1} \left[2 (x+1)^2(1-x)(x^2+1) \right]. \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-165a23d8e8ea0ffa7e0dc4b54d0f7038_l3.png "Rendered by QuickLaTeX.com")
If we identify  , we find
, we find  so multiplicity here is .
so multiplicity here is .
Last but not least, we turn our attention to our last zero, , which we obtained from solving  . However, from
. However, from  , we see the zero
, we see the zero  corresponds to the factor
corresponds to the factor  . We have
. We have
![\[ \begin{array}{rcl} p(x) &=& (x-1)^{1}\left[- (2x-1)(x+1)^2(x^2+1)\right] . \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d7d89528387416f0764aeb56068edb7c_l3.png "Rendered by QuickLaTeX.com")
Identifying  , we see
, we see  , so the multiplicity here as well.
, so the multiplicity here as well.
Example 2.2.3.2
Let . Describe the behavior of the graph of near each of the -intercepts.
Solution:
Describe the behavior of the graph of near each of the -intercepts.
From Theorem 2.6, because the multiplicities of and are both odd, we know the graph of crosses through the -axis at  and
and  . More specifically, due to the fact that the multiplicity for both of these zeros is , the graph will look locally linear at these points.
. More specifically, due to the fact that the multiplicity for both of these zeros is , the graph will look locally linear at these points.
Based on our calculations above, near , the graph will resemble the increasing line  , and near , the graph will resemble the decreasing line
, and near , the graph will resemble the decreasing line  .
.
As the multiplicity of is even, we know the graph of touches and rebounds at . The multiplicity of is , thus the rebound will look locally like a parabola. More specifically, the graph near will resemble  .
.
Example 2.2.3.3
Let . Determine the end behavior and -intercept of the graph of .
Solution:
Determine the end behavior and -intercept of the graph of .
Per Theorem 2.4, the end behavior of  , matches the end behavior of its leading term. As in Example 2.2.2, we multiply the leading terms from each factor together to obtain the leading term for :
, matches the end behavior of its leading term. As in Example 2.2.2, we multiply the leading terms from each factor together to obtain the leading term for :
![\[ \begin{array}{rcl} p(x) &=& (2x-1)(x+1)(1-x^4) \\ &=& (2x)(x)(-x^4) + \ldots \\ &=& -2x^6 + \ldots \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-630cc02dec93e753848eded0360ef718_l3.png "Rendered by QuickLaTeX.com")
The degree here, , is even and the leading coefficient  , so we know as ,
, so we know as ,  .
.
To find the -intercept, we determine  , hence, the -intercept is
, hence, the -intercept is 
Example 2.2.3.4
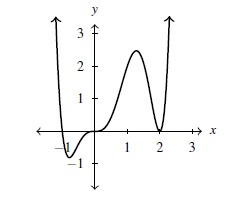
Let . Sketch .
Solution:
Sketch .
From the end behavior, , , we start the graph in Quadrant III and head towards .
At , we `bounce’ off of the -axis and head towards the -intercept,  .
.
We then head towards  and cross through the -axis there.
and cross through the -axis there.
Finally, we head back to the -axis and cross through at .
Owing to the end behavior , , we exit the picture in Quadrant IV.
Remember polynomial functions are continuous and smooth, thus we have no holes or gaps in the graph, and all the `turns’ are rounded (no abrupt turns or corners.) We produce something resembling the next graph.

A couple of remarks about Example 2.2.3 are in order. First, notice that the factor  was more of a spectator in our discussion of the zeros of . Indeed, if we set
was more of a spectator in our discussion of the zeros of . Indeed, if we set  , we have
, we have  which provides no real solutions.[17] That being said, the factor
which provides no real solutions.[17] That being said, the factor  does affect the shape of the graph. Next, when connecting up the graph from to to , there really is no way for us to know how low the graph goes, or where the lowest point is between and unless we plot more points. Likewise, we have no idea how high the graph gets between and . While there are ways to determine these points analytically, more often than not, finding them requires Calculus. As these points do play an important role in many applications, we’ll need to discuss them in this course and, when required, we’ll use technology to find them. For that reason, we have the following definition:
does affect the shape of the graph. Next, when connecting up the graph from to to , there really is no way for us to know how low the graph goes, or where the lowest point is between and unless we plot more points. Likewise, we have no idea how high the graph gets between and . While there are ways to determine these points analytically, more often than not, finding them requires Calculus. As these points do play an important role in many applications, we’ll need to discuss them in this course and, when required, we’ll use technology to find them. For that reason, we have the following definition:
Definition 2.10
Suppose is a function with  .
.
- We say has a local minimum at the point
 if and only if there is an open interval
if and only if there is an open interval  containing for which
containing for which  for all in . The value is called `a local minimum value of .’ That is, is the minimum value over an open interval containing . Graphically, no points `near’ a local minimum are lower than .
for all in . The value is called `a local minimum value of .’ That is, is the minimum value over an open interval containing . Graphically, no points `near’ a local minimum are lower than . - We say has a local maximum at the point if and only if there is an open interval containing for which
 for all in . The value is called `a local maximum value of .’ That is, is the maximum value over an open interval containing . Graphically, no points `near’ a local maximum are higher than .
for all in . The value is called `a local maximum value of .’ That is, is the maximum value over an open interval containing . Graphically, no points `near’ a local maximum are higher than .
Taken together, the local maximums and local minimums of a function, if they exist, are called the local extrema of the function.
Once again, the terminology used in Definition 2.10 blurs the line between the function and its outputs, . Also, some textbooks use the terms `relative’ minimum and `relative’ maximum instead of the adjective `local.’ Lastly, note the definition of local extrema requires an open interval exist in the domain containing in order for  to be a candidate for a local maximum or local minimum. We’ll have more to say about this in later chapters. If our open interval happens to be , then our local extrema are the extrema of – we’ll see an example of this momentarily.
to be a candidate for a local maximum or local minimum. We’ll have more to say about this in later chapters. If our open interval happens to be , then our local extrema are the extrema of – we’ll see an example of this momentarily.
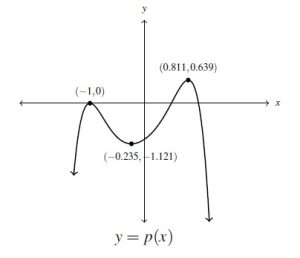
Below we use a graphing utility to graph  . We first consider the point . Even though there are points on the graph of that are higher than , locally, is the top of a hill. To satisfy Definition 2.10, we need to provide an open interval on which
. We first consider the point . Even though there are points on the graph of that are higher than , locally, is the top of a hill. To satisfy Definition 2.10, we need to provide an open interval on which  is the largest, or maximum function value. Note the definition requires us to provide \textit{just one} open interval. One that works is the interval
is the largest, or maximum function value. Note the definition requires us to provide \textit{just one} open interval. One that works is the interval  . We could use any smaller interval or go as large as
. We could use any smaller interval or go as large as  (can you see why?) Next we encounter a `low’ point at approximately
(can you see why?) Next we encounter a `low’ point at approximately  . More specifically, for all in the interval, say,
. More specifically, for all in the interval, say,  ,
,  , Hence, we have a local minimum at . Lastly, at
, Hence, we have a local minimum at . Lastly, at  , we are back to a high point. In fact,
, we are back to a high point. In fact,  isn’t just a local maximum value, based on the graph, it is the maximum of . Here, we may choose the open interval as the open interval required by Definition 2.10, because for all ,
isn’t just a local maximum value, based on the graph, it is the maximum of . Here, we may choose the open interval as the open interval required by Definition 2.10, because for all ,  . It is important to note that there is no minimum value of despite there being a local minimum value.[18]
. It is important to note that there is no minimum value of despite there being a local minimum value.[18]
We close this section with a classic application of a third degree polynomial function.
Example 2.2.4
Example 2.2.4.1
A box with no top is to be fashioned from a  inch
inch 
 inch piece of cardboard by cutting out congruent squares from each corner of the cardboard and then folding the resulting tabs. Let denote the length of the side of the square which is removed from each corner.
inch piece of cardboard by cutting out congruent squares from each corner of the cardboard and then folding the resulting tabs. Let denote the length of the side of the square which is removed from each corner.

Write an expression for  , the volume of the box produced by removing squares of edge length . Include an appropriate domain.
, the volume of the box produced by removing squares of edge length . Include an appropriate domain.
Solution:
Write an expression for , the volume of the box produced by removing squares of edge length . Include an appropriate domain.
From Geometry, we know that Volume = width height depth. The key is to find each of these quantities in terms of . From the figure, we see that the height of the box is itself. The cardboard piece is initially inches wide. Removing squares with a side length of inches from each corner leaves  inches for the width.[19] As for the depth, the cardboard is initially inches long, so after cutting out inches from each side, we would have
inches for the width.[19] As for the depth, the cardboard is initially inches long, so after cutting out inches from each side, we would have  inches remaining. Hence, we get
inches remaining. Hence, we get
![\[V(x) = x(10-2x)(12-2x)\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-075df2a705768e68064ca9e1e3990cd9_l3.png "Rendered by QuickLaTeX.com")
To find a suitable applied domain, we note that to make a box at all we need  . Also the shorter of the two dimensions of the cardboard is inches, and as we are removing
. Also the shorter of the two dimensions of the cardboard is inches, and as we are removing  inches from this dimension, we also require
inches from this dimension, we also require  or
or  . Hence, our applied domain is
. Hence, our applied domain is  .
.
Example 2.2.4.2
A box with no top is to be fashioned from a inch inch piece of cardboard by cutting out congruent squares from each corner of the cardboard and then folding the resulting tabs. Let denote the length of the side of the square which is removed from each corner.
Use a graphing utility to help you determine the value of which produces the box with the largest volume. What is the largest volume? Round your answers to two decimal places.
Solution:
Use a graphing utility to help you determine the value of which produces the box with the largest volume. What is the largest volume? Round your answers to two decimal places.
Using a graph and technology, we identify a local maximum at approximately  . Because the domain of
. Because the domain of  is restricted to the interval
is restricted to the interval  , the maximum of is here as well.
, the maximum of is here as well.

This means the maximum volume attainable is approximately 96.77 cubic inches when we remove squares of approximately 1.81 inches per side.
Notice that there is a very slight, but important, difference between the function  , from Example 2.2.4 and the function
, from Example 2.2.4 and the function  : their domains. The domain of is restricted to the interval while the domain of is . Indeed, the function has a maximum of (approximately) 96.771 at (approximately) x = 1.811 whereas for the function , 96.771 is a local maximum value only. We leave it to the reader to verify that has neither a minimum nor a local minimum.
: their domains. The domain of is restricted to the interval while the domain of is . Indeed, the function has a maximum of (approximately) 96.771 at (approximately) x = 1.811 whereas for the function , 96.771 is a local maximum value only. We leave it to the reader to verify that has neither a minimum nor a local minimum.
2.2.3 Section Exercises
In Exercises 1 – 6, given the pair of functions and , sketch the graph of  by starting with the graph of and using Theorem 2.2. Track at least three points of your choice through the transformations. State the domain and range of .
by starting with the graph of and using Theorem 2.2. Track at least three points of your choice through the transformations. State the domain and range of .
- and

 and
and 
- and

 and
and 
- and

 and
and 
In Exercises 7 – 8, find a formula for each function below in the form  .
.


In Exercises 9 – 10, find a formula for each function below in the form  .
.


In Exercises 11 – 20, find the degree, the leading term, the leading coefficient, the constant term and the end behavior of the given polynomial function.










In Exercises 21 – 30, find the real zeros of the given polynomial and their corresponding multiplicities. Use this information along with end behavior to provide a rough sketch of the graph of the polynomial function.










In Exercises 31 – 45, determine analytically if the following functions are even, odd or neither.















- Suppose is a polynomial function written in the form of Definition 2.7.
- If the nonzero terms of consist of even powers of (or a constant), explain why is even.
- If the nonzero terms of consist of odd powers of , explain why is odd.
- If the nonzero terms of contain at least one odd power of and one even power of (or a constant term), then is neither even nor odd.
- If the nonzero terms of
- Use the results of Exercise 46 to determine whether the following functions are even, odd, or neither.
- Show is an even function.
- Rework Example 2.2.4 assuming the box is to be made from an 8.5 inch by 11 inch sheet of paper. Using scissors and tape, construct the box. Are you surprised?[20]
- For each function listed below, compute the average rate of change over the indicated interval.[21] What trends do you observe? How do your answers manifest themselves graphically?
![\[ \begin{array}{|r||c|c|c|c|c|c|} \hline f(x) & [-0.1, 0] & [0, 0.1] &[0.9, 1] & [1, 1.1] & [1.9, 2] & [2, 2.1] \\ \hline 1 &&&&&& \\ \hline x &&&&&& \\ \hline x^2 &&&&&& \\ \hline x^3 &&&&&& \\ \hline x^4 &&&&&& \\ \hline x^5 &&&&&& \\ \hline \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d21c4f348e70e7f71d71ac8841c8930a_l3.png "Rendered by QuickLaTeX.com")
- For each function listed below, compute the average rate of change over the indicated interval.[22] What trends do you observe? How do your answers manifest themselves graphically?
![\[ \begin{array}{|r||c|c|c|c|} \hline f(x) & [0.9, 1.1] & [0.99, 1.01] &[0.999, 1.001] & [0.9999, 1.0001] \\ \hline 1 &&&& \\ \hline x &&&& \\ \hline x^2 &&&& \\ \hline x^3 &&&& \\ \hline x^4 &&&& \\ \hline x^5 &&&& \\ \hline \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-432bcfffc27d2d8e715ecaf39e0b32a4_l3.png "Rendered by QuickLaTeX.com")




In Exercises 52 – 54, suppose the revenue  , in \textit{thousands} of dollars, from producing and selling \textit{hundred} LCD TVs is given by
, in \textit{thousands} of dollars, from producing and selling \textit{hundred} LCD TVs is given by  for
for  .
.
- Graph
 and determine the number of TVs which should be sold to maximize revenue. What is the maximum revenue?
and determine the number of TVs which should be sold to maximize revenue. What is the maximum revenue? - Assume the cost, in thousands of dollars, to produce hundred LCD TVs is given by the function
 for
for  . Find and simplify an expression for the profit function
. Find and simplify an expression for the profit function  .(Remember: Profit = Revenue – Cost.)
.(Remember: Profit = Revenue – Cost.) - Graph
 and determine the number of TVs which should be sold to maximize profit. What is the maximum profit?
and determine the number of TVs which should be sold to maximize profit. What is the maximum profit? - While developing their newest game, Sasquatch Attack!, the makers of the PortaBoy (from Example 1.3.8) revised their cost function and now use
 , for . As before,
, for . As before,  is the cost to make PortaBoy Game Systems. Market research indicates that the demand function
is the cost to make PortaBoy Game Systems. Market research indicates that the demand function  remains unchanged. Use a graphing utility to find the production level that maximizes the profit made by producing and selling PortaBoy game systems.
remains unchanged. Use a graphing utility to find the production level that maximizes the profit made by producing and selling PortaBoy game systems. - According to US Postal regulations, a rectangular shipping box must satisfy the following inequality: “Length + Girth
 130 inches” for Parcel Post and “Length + Girth 108 inches” for other services. Let’s assume we have a closed rectangular box with a square face of side length as drawn below. The length is the longest side and is clearly labeled. The girth is the distance around the box in the other two dimensions so in our case it is the sum of the four sides of the square,
130 inches” for Parcel Post and “Length + Girth 108 inches” for other services. Let’s assume we have a closed rectangular box with a square face of side length as drawn below. The length is the longest side and is clearly labeled. The girth is the distance around the box in the other two dimensions so in our case it is the sum of the four sides of the square,  .
.
- Assuming that we’ll be mailing a box via Parcel Post where Length + Girth
 130 inches, express the length of the box in terms of and then express the volume of the box in terms of .
130 inches, express the length of the box in terms of and then express the volume of the box in terms of . - Find the dimensions of the box of maximum volume that can be shipped via Parcel Post.
- Repeat parts 56a and 56b if the box is shipped using “other services”.

- Assuming that we’ll be mailing a box via Parcel Post where Length + Girth
- Below is a graph of a polynomial function . Answer the following questions about based on the graph provided.

- Describe the end behavior of .
- List the real zeros of along with their respective multiplicities.
- List the local minimums and local maximums of the graph of .
- What can be said about the degree of and leading coefficient ?
- It turns out that is a seventh degree polynomial.[23] How can this be?
- Describe the end behavior of
- Use the graph of prior to Example 2.2.4 to estimate the largest open interval containing
 which satisfies the the criteria for `local minimum’ in Definition 2.10.
which satisfies the the criteria for `local minimum’ in Definition 2.10. - (This is a follow-up to Exercises 96 in Section 1.3.1 and 33 in Section 2.1.) The Lagrange Interpolate function
 for four points:
for four points:  ,
,  ,
,  ,
,  where
where  ,
,  ,
,  , and
, and  are four distinct real numbers is given by the formula:
are four distinct real numbers is given by the formula:
![\[ \begin{array}{rcl}L(x) & = & y_{0} \dfrac{(x - x_{1}) (x - x_{2}) (x-x_{3})}{(x_{0} - x_{1})(x_{0} - x_{2})(x_{0} - x_{3})}+ y_{1} \dfrac{(x - x_{0}) (x - x_{2}) (x-x_{3})}{(x_{1} - x_{0})(x_{1} - x_{2})(x_{1} - x_{3})} \\ [15pt] && +y_{2} \dfrac{(x - x_{0}) (x - x_{1}) (x-x_{3})}{(x_{2} - x_{0})(x_{2} - x_{1})(x_{2} - x_{3})}+ y_{3} \dfrac{(x - x_{0}) (x - x_{1}) (x-x_{2})}{(x_{3} - x_{0})(x_{3} - x_{1})(x_{3} - x_{2})} \\ \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b6fc7cbed8a58984f2977c36c0e0275c_l3.png "Rendered by QuickLaTeX.com")
- Choose four points with different -values and construct the Lagrange Interpolate for those points. Verify each of the points lies on the polynomial.
- Verify that, in general,
 ,
,  ,
,  , and
, and  .
. - Find
 for the points , , and
for the points , , and  . What happens?
. What happens? - Find for the points ,
 ,
,  and
and  . What happens?
. What happens? - Generalize the formula for to five points. What’s the pattern?
- Choose four points with different
Section 2.2 Exercise Answers can be found in the Appendix … Coming soon
- More specifically, is an indeterminate form. These are studied extensively in Calculus. ↵
- This is why we do not describe monomial functions as having the form for any whole number . See Section 0.1.1. ↵
- Recall that
 is equivalent to
is equivalent to  and
and  is equivalent to or . Using absolute values allow us to describe these sets of real numbers more succinctly. ↵
is equivalent to or . Using absolute values allow us to describe these sets of real numbers more succinctly. ↵ - This should sound familiar - see the comments regarding the range of in Section 2.1. ↵
- Do you see the importance of being odd here? ↵
- We are using the dummy variable here instead of for reasons that will become apparent shortly. ↵
- That is, for a fixed number every real number can be written as
 for some real number , and every real number can be written as
for some real number , and every real number can be written as  for some real number . ↵
for some real number . ↵ - Sometimes called the `long run' behavior. ↵
- said differently, negative values that are larger in absolute value ↵
- That is, the values grow larger than any positive number. They are `unbounded.' ↵
- Some authors say has degree
 for reasons not even we will go into. ↵
for reasons not even we will go into. ↵ - We are considering , thus we are not concerned with even being close to , so these fractions will all be defined. ↵
- Or at least they appear to within the limits of the technology. ↵
- Both of which, by the way, can lead one astray, so we must proceed cautiously. ↵
- Again, the formal definition of `continuity' and properties of continuous functions are discussed in Calculus. ↵
- in accordance with the Zero Product Property of the Real Numbers - see Section 0.1. ↵
- The solutions are
 - see Section 0.5.6. ↵
- see Section 0.5.6. ↵ - Some books use the adjectives `global' or `absolute' when describing the extreme values of a function to distinguish them from their local counterparts. ↵
- There's no harm in taking an extra step here and making sure this makes sense. If we chopped out a inch square from each side, then the width would be
 inches, so chopping out inches would leave inches. ↵
inches, so chopping out inches would leave inches. ↵ - Consider decorating the box and presenting it to your instructor. If done well enough, maybe your instructor will issue you some bonus points. Or maybe not. ↵
- See Definition 1.11 in Section 1.3.4 for a review of this concept, as needed. ↵
- See Definition 1.11 in Section 1.3.4 for a review of this concept, as needed. ↵
- to be exact,
 . ↵
. ↵
A constant function or a function of the form x raised to a natural number.
A function is even if f(-x)=f(x) for all x in the domain of f.
A function is odd if f(-x)=-f(x) for all x in the domain of f.
A function with the sum or difference between terms of x raised to whole number powers.
The degree of a polynomial is the largest natural number the variable of the polynomial is raised to.
The leading term of a polynomial is the term containing the largest natural number power.
The leading coefficient of a polynomial is the coefficient of the leading term.
The term of a polynomial with the variable raised to the 0 power or the term with only a constant and no variable.
The multiplicity of a zero is the number of times the zero occurs for a function.
