7.2 Sine and Cosine Functions
7.2.1 Right Triangle Definitions
This section focuses on right triangles, triangles in which one angle measures  . Consider the right triangle below, where, as usual, the small square
. Consider the right triangle below, where, as usual, the small square  denotes the right angle, the labels `
denotes the right angle, the labels ` ,’ `
,’ ` ,’ and `
,’ and ` ‘ denote the lengths of the sides of the triangle, and
‘ denote the lengths of the sides of the triangle, and  and
and  represent the (measure of) the non-right angles. As you may recall, the side opposite the right angle is called the hypotenuse of the right triangle. Also note that because the sum of the measures of all angles in a triangle must add to
represent the (measure of) the non-right angles. As you may recall, the side opposite the right angle is called the hypotenuse of the right triangle. Also note that because the sum of the measures of all angles in a triangle must add to  , we have
, we have  , or
, or  . Said differently, the non-right angles in a right triangle are complements.
. Said differently, the non-right angles in a right triangle are complements.

We now state and prove the most famous result about right triangles: The Pythagorean Theorem.
Theorem 7.1 The Pythagorean Theorem
The square of the length of the hypotenuse of a right triangle is equal to the sums of the squares of the other two sides.
More specifically, if is the length of the hypotenuse of a right triangle and and are the lengths of the other two sides, then  .
.
There are several proofs of the Pythagorean Theorem,[1] but the one we choose to reproduce here showcases a nice interplay between algebra and geometry. Consider taking four copies of the right triangle below on the left and arranging them as seen below on the right.
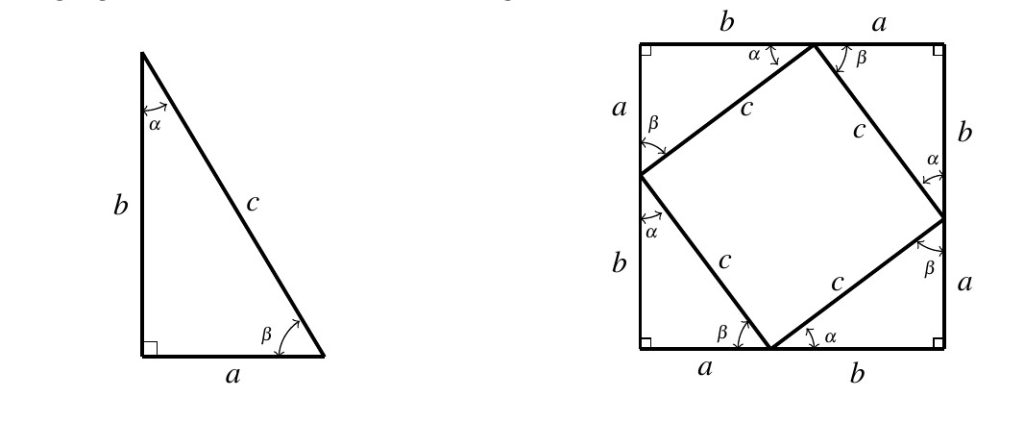
It should be clear that we have produced a large square with a side length of  . What is also true, but may not be obvious, is that the inner quadrilateral is also a square. We can readily see the inner quadrilateral has equal sides of length . Moreover, because , we get the interior angles of the inner quadrilateral are each . Hence, the inner quadrilateral is indeed a square.
. What is also true, but may not be obvious, is that the inner quadrilateral is also a square. We can readily see the inner quadrilateral has equal sides of length . Moreover, because , we get the interior angles of the inner quadrilateral are each . Hence, the inner quadrilateral is indeed a square.
We finish the proof by computing the area of the large square in two ways. First, we square the length of its side:  . Next, we add up the areas of the four triangles, each having area
. Next, we add up the areas of the four triangles, each having area  along with the area of the inner square,
along with the area of the inner square,  . Equating these to expressions gives:
. Equating these to expressions gives:  . As a result of
. As a result of  and
and  , we have
, we have  or
or  , as required.
, as required.
It should be noted that the converse of the Pythagorean Theorem is also true. That is if , , and are the lengths of sides of a triangle and , then the triangle is a right triangle.[2]
A list of integers  which satisfy the relationship is called a Pythagorean Triple. Some of the more common triples are:
which satisfy the relationship is called a Pythagorean Triple. Some of the more common triples are:  ,
,  ,
,  , and
, and  . We leave it to the reader to verify these integers satisfy the equation and suggest committing these triples to memory.
. We leave it to the reader to verify these integers satisfy the equation and suggest committing these triples to memory.
Next, we set about defining characteristic ratios associated with acute angles. Given any acute angle  , we can imagine being an interior angle of a right triangle as seen below.
, we can imagine being an interior angle of a right triangle as seen below.
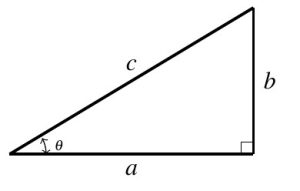
Focusing on the arrangement of the sides of the triangle with respect to the angle , we make the following definitions: the side with length is called the side of the triangle which is adjacent to and the side with length is called the side of the triangle opposite . As usual, the side labeled `‘ (the side opposite the right angle) is the hypotenuse. Using this diagram, we define two important trigonometric ratios of .
Definition 7.2
Suppose is an acute angle residing in a right triangle as depicted above.
- The sine of , denoted
 is defined by the ratio:
is defined by the ratio:  , or
, or  .
. - The cosine of , denoted
 is defined by the ratio:
is defined by the ratio:  , or
, or  .
.
For example, consider the angle indicated in the 3-4-5 triangle given. Using Definition 7.2, we get  and
and  . One may well wonder if these trigonometric ratios we’ve found for change if the triangle containing changes. For example, if we scale all the sides of the 3-4-5 triangle on the left by a factor of
. One may well wonder if these trigonometric ratios we’ve found for change if the triangle containing changes. For example, if we scale all the sides of the 3-4-5 triangle on the left by a factor of  , we produce the similar triangle below in the middle.[3] Using this triangle to compute our ratios for , we find
, we produce the similar triangle below in the middle.[3] Using this triangle to compute our ratios for , we find  and
and  . Note that the scaling factor, here , is common to all sides of the triangle, and, hence, divides out of the numerator and denominator when simplifying each of the ratios.
. Note that the scaling factor, here , is common to all sides of the triangle, and, hence, divides out of the numerator and denominator when simplifying each of the ratios.
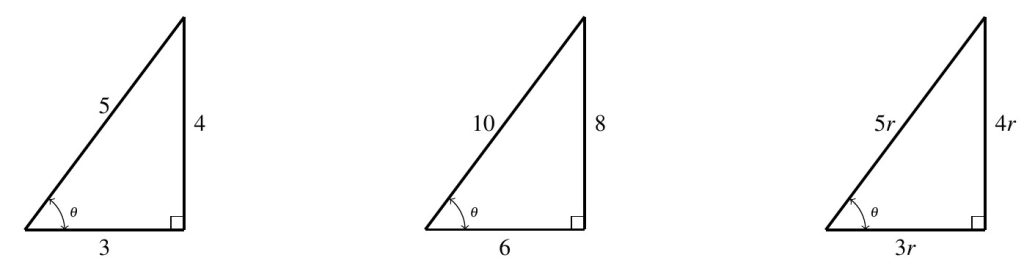
In general, thanks to the Angle Angle Similarity Postulate, any two right triangles which contain our angle are similar which means there is a positive constant  so that the sides of the triangle are
so that the sides of the triangle are  ,
,  , and
, and  as seen above on the right. Hence, regardless of the right triangle in which we choose to imagine ,
as seen above on the right. Hence, regardless of the right triangle in which we choose to imagine ,  and
and  . Generalizing this same argument to any acute angle assures us that the ratios as described in Definition 7.2 are independent of the triangle we use.
. Generalizing this same argument to any acute angle assures us that the ratios as described in Definition 7.2 are independent of the triangle we use.
Our next objective is to determine the values of and for some of the more commonly used angles. We begin with  . In a right triangle, if one of the non-right angles measures , then the other measures as well. It follows that the two legs of the triangle must be congruent. We may choose any right triangle containing a angle for our computations, thus we choose the length of one (hence both) of the legs to be
. In a right triangle, if one of the non-right angles measures , then the other measures as well. It follows that the two legs of the triangle must be congruent. We may choose any right triangle containing a angle for our computations, thus we choose the length of one (hence both) of the legs to be  . The Pythagorean Theorem gives the hypotenuse is:
. The Pythagorean Theorem gives the hypotenuse is:  , so
, so  . (We take only the positive square root here as represents the length of the hypotenuse here, so, necessarily
. (We take only the positive square root here as represents the length of the hypotenuse here, so, necessarily  .) From this, we obtain the values below, and suggest committing them to memory.
.) From this, we obtain the values below, and suggest committing them to memory.
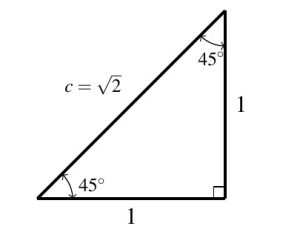


Note that we have `rationalized’ here to avoid the irrational number  appearing in the denominator. This is a common convention in trigonometry, and we will adhere to it unless extremely inconvenient.
appearing in the denominator. This is a common convention in trigonometry, and we will adhere to it unless extremely inconvenient.
Next, we investigate  and
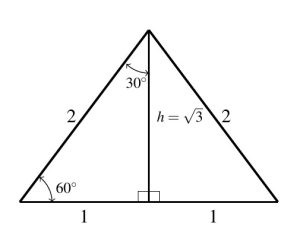
and  angles. Consider the equilateral triangle each of whose sides measures units. Each of its interior angles is necessarily , so if we drop an altitude, we produce two
angles. Consider the equilateral triangle each of whose sides measures units. Each of its interior angles is necessarily , so if we drop an altitude, we produce two  triangles each having a base measuring unit and a hypotenuse of units. Using the Pythagorean Theorem, we can find the height,
triangles each having a base measuring unit and a hypotenuse of units. Using the Pythagorean Theorem, we can find the height,  of these triangles:
of these triangles:  so
so  or
or  . Using these, we can find the values of the trigonometric ratios for both and . Again, we recommend committing these values to memory.
. Using these, we can find the values of the trigonometric ratios for both and . Again, we recommend committing these values to memory.
Sine Values:


Cosine Values:


Recall and are complements, so the side adjacent to the angle is the side opposite the and the side opposite the angle is the side adjacent to the . This sort of `swapping’ is true of all complementary angles and will be generalized in Section 8.2, Theorem 8.6.
Note that the values of the trigonometric ratios we have derived for , , and angles are the exact values of these ratios. For these angles, we can conveniently express the exact values of their sines and cosines resorting, at worst, to using square roots. The reader may well wonder if, for instance, we can express the exact value of, say,  in terms of radicals. The answer in this case is `yes’ (see here), but, in general, we will not take the time to pursue such representations.[4] Hence, if a problem requests an `exact’ answer involving , we will leave it written as `‘ and use a calculator to produce a suitable approximation as the situation warrants.
in terms of radicals. The answer in this case is `yes’ (see here), but, in general, we will not take the time to pursue such representations.[4] Hence, if a problem requests an `exact’ answer involving , we will leave it written as `‘ and use a calculator to produce a suitable approximation as the situation warrants.
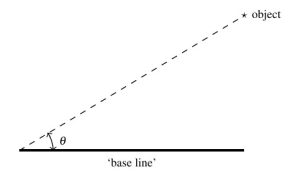
The angle of inclination (or angle of elevation) of an object refers to the angle whose initial side is some kind of base-line (say, the ground), and whose terminal side is the line-of-sight to an object above the base-line. Schematically:
7.2.2 Unit Circle Definitions
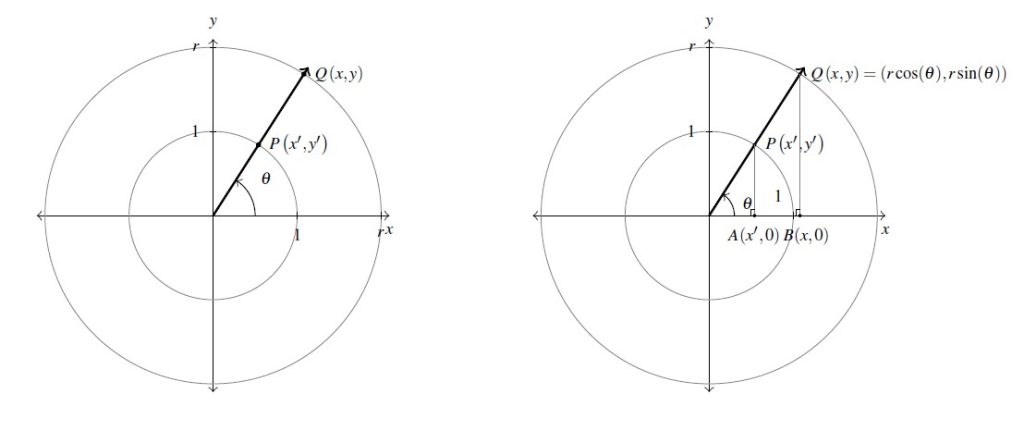
In Section 7.1.3, we introduced circular motion and derived a formula which describes the linear velocity of an object moving on a circular path at a constant angular velocity. One of the goals of this section is describe the position of such an object. To that end, consider an angle in standard position and let  denote the point where the terminal side of intersects the Unit Circle, as diagrammed below.
denote the point where the terminal side of intersects the Unit Circle, as diagrammed below.
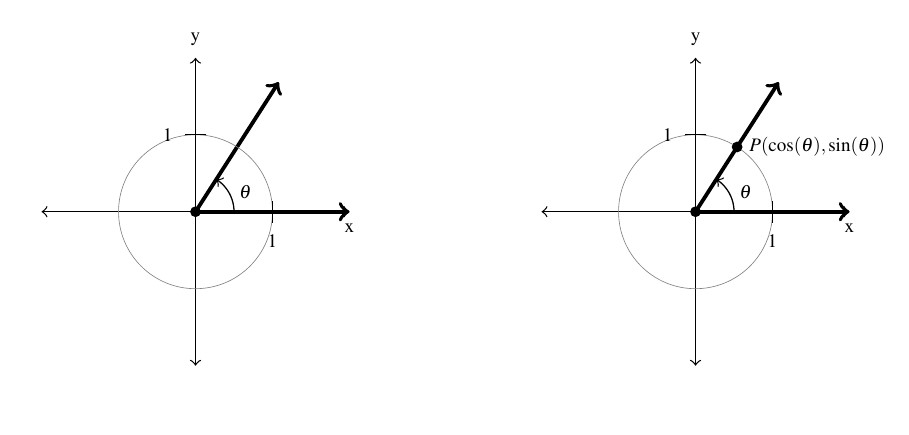
By associating the point with the angle , we are assigning a position on the Unit Circle to the angle . For each angle , the terminal side of , when graphed in standard position, intersects The Unit Circle only once, so the mapping of to is a function.[5] Because there is only one way to describe a point using rectangular coordinates,[6] the mappings of to each of the  and
and  coordinates of are also functions. We give these functions names in the following definition.
coordinates of are also functions. We give these functions names in the following definition.
Definition 7.3
Suppose an angle is graphed in standard position. Let  be the point of intersection of the terminal side of and the Unit Circle.
be the point of intersection of the terminal side of and the Unit Circle.
- The -coordinate of is called the cosine of , written .
- The -coordinate of is called the sine of , written .[7]
You may have already seen definitions for the sine and cosine of an (acute) angle in terms of ratios of sides of a right triangle.[8] While not incorrect, defining sine and cosine using right triangles limits the angles we can study to acute angles only. Definition 7.3, on the other hand, applies to all angles. These functions are defined in terms of points on the Unit Circle, thus they are called circular functions. Rest assured, Definition 7.3 specializes to Definition 7.2 when is an acute angle. We will see instances of this fact in the next example.
Example 7.2.1
Example 7.2.1.1
State the sine and cosine of the following angles.

Solution:
State the sine and cosine of .
To find  and
and  , we plot the angle
, we plot the angle  in standard position and find the point on the terminal side of which lies on the Unit Circle. As
in standard position and find the point on the terminal side of which lies on the Unit Circle. As  represents
represents  of a counter-clockwise revolution, the terminal side of lies along the negative -axis.
of a counter-clockwise revolution, the terminal side of lies along the negative -axis.
Hence, the point we seek is  so that
so that  and
and  .
.

Example 7.2.1.2
State the sine and cosine of the following angles.

Solution:
State the sine and cosine of .
The angle  represents one half of a clockwise revolution so its terminal side lies on the negative -axis.
represents one half of a clockwise revolution so its terminal side lies on the negative -axis.
The point on the Unit Circle that lies on the negative -axis is  which means
which means  and
and  .
.

Example 7.2.1.3
State the sine and cosine of the following angles.

Solution:
State the sine and cosine of .
In this section, we derived values for  and
and  using Definition 7.2. In order to connect what we know from Section 7.2.1 with what we are asked to find per Definition 7.3, we sketch in standard position and let denote the point on the terminal side of which lies on the Unit Circle. If we drop a perpendicular line segment from to the -axis as shown, we obtain a
using Definition 7.2. In order to connect what we know from Section 7.2.1 with what we are asked to find per Definition 7.3, we sketch in standard position and let denote the point on the terminal side of which lies on the Unit Circle. If we drop a perpendicular line segment from to the -axis as shown, we obtain a  right triangle whose legs have lengths and units with hypotenuse .
right triangle whose legs have lengths and units with hypotenuse .
From our work in Section 7.2.1, we obtain the (familiar) values  and
and  .
.

Example 7.2.1.4
State the sine and cosine of the following angles.

Solution:
State the sine and cosine of .
As before, the terminal side of does not lie on any of the coordinate axes, so we proceed using a triangle approach. Letting denote the point on the terminal side of which lies on the Unit Circle, we drop a perpendicular line segment from to the -axis to form a right triangle.
Re-using some of our work from this section, we get  and
and  .
.

Example 7.2.1.5
State the sine and cosine of the following angles.

Solution:
State the sine and cosine of .
We plot in standard position below on the left and, as usual, let denote the point on the terminal side of which lies on the Unit Circle. In plotting , we find it lies  radians short of one half revolution.
radians short of one half revolution.
As we’ve just determined that  and
and  , we know the coordinates of the point
, we know the coordinates of the point  below on the right are
below on the right are  .
.
Using symmetry, the coordinates of are  , so
, so  and
and  .
.

A few remarks are in order. First, after having re-used some of our work from this section in a few specific instances, we can reconcile Definition 7.3 with Definition 7.2 in the case is an acute angle. We situate in a right triangle with hypotenuse length , adjacent side length `,’ and the opposite side length `‘ as seen below on the left. Placing the vertex of at the origin and the adjacent side of along the -axis as seen below on the right effectively puts in standard position with ‘s adjacent side as the initial side of and the hypotenuse as the terminal side of . The hypotenuse of the triangle has length , thus we know the point is on the Unit Circle.[9]

Definition 7.2 gives  and
and  which exactly matches Definition 7.3. Hence, in the case of acute angles, the two definitions agree. In other words, the values of the trigonometric ratios} of acute angles are the same as the corresponding circular function values.
which exactly matches Definition 7.3. Hence, in the case of acute angles, the two definitions agree. In other words, the values of the trigonometric ratios} of acute angles are the same as the corresponding circular function values.
A second important take-away from Example 7.2.1 is use of symmetry in number 5. Indeed, we found the sine and cosine of  using the (acute) angle `for reference.’ As the Unit Circle is rife with symmetry, we would like to generalize this concept and exploit symmetry whenever possible. To that end, we introduce the notion of reference angle.
using the (acute) angle `for reference.’ As the Unit Circle is rife with symmetry, we would like to generalize this concept and exploit symmetry whenever possible. To that end, we introduce the notion of reference angle.
In general, for a non-quadrantal angle , the reference angle for (which we’ll usually denote ) is the acute angle made between the terminal side of and the -axis. If is a Quadrant I or IV angle, is the angle between the terminal side of and the positive -axis:
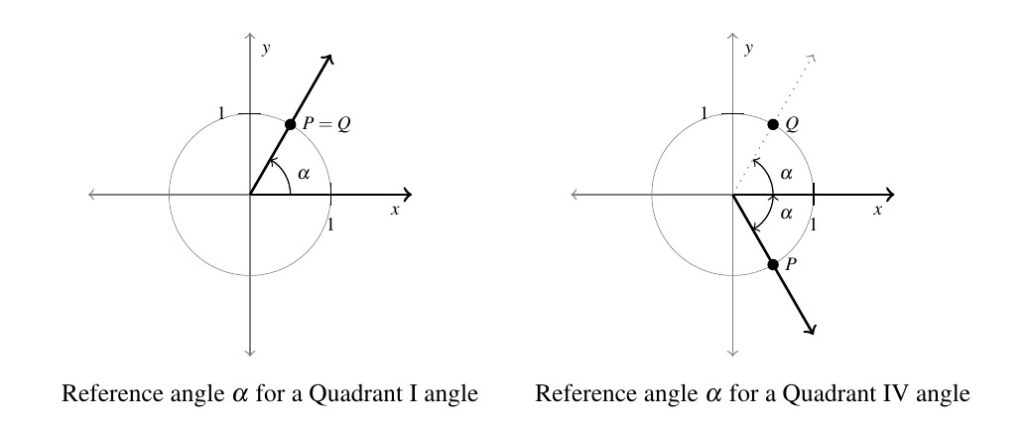
If is a Quadrant II or III angle, is the angle between the terminal side of and thenegative -axis:
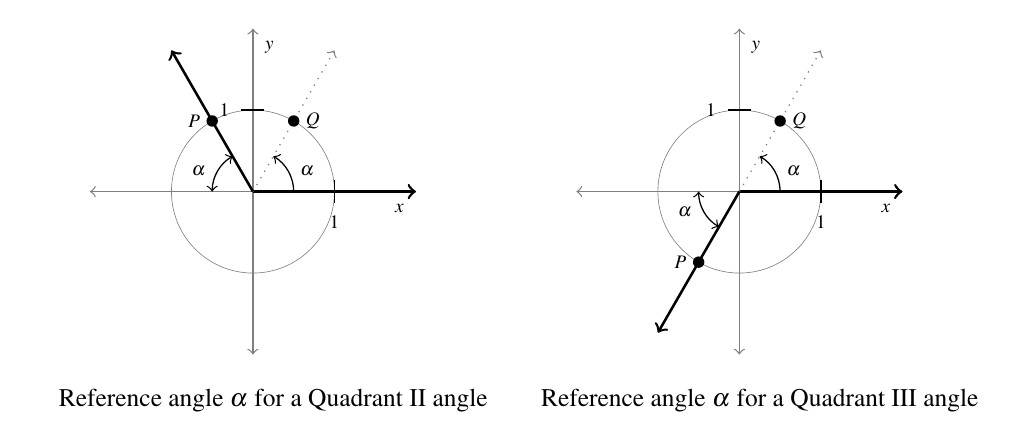
If we let denote the point  , then lies on the Unit Circle. Due to the fact that the Unit Circle possesses symmetry with respect to the -axis, -axis and origin, regardless of where the terminal side of lies, there is a point symmetric with which determines ‘s reference angle, . The only difference between the points and are the signs of their coordinates,
, then lies on the Unit Circle. Due to the fact that the Unit Circle possesses symmetry with respect to the -axis, -axis and origin, regardless of where the terminal side of lies, there is a point symmetric with which determines ‘s reference angle, . The only difference between the points and are the signs of their coordinates,  . Hence, we have the following:
. Hence, we have the following:
Theorem 7.2 Reference Angle Theorem
Suppose is the reference angle for . Then:
![\[\cos(\theta) = \pm \cos(\alpha) \text{ and } \sin(\theta) = \pm \sin(\alpha),\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-70c67c52cfef1ba308411d97516a11c2_l3.png "Rendered by QuickLaTeX.com")
where the choice of the () depends on the quadrant in which the terminal side of lies.
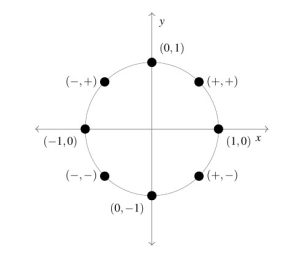
In light of Theorem 7.2, it pays to know the sine and cosine values for certain common Quadrant I angles as well as to keep in mind the signs of the coordinates of points in the given quadrants.
![\[ \begin{array}{|c|c||c|c|} \hline \theta (\text{degrees}) & \theta (\text{radians}) & \cos(\theta) & \sin(\theta) \\ \hline 0^{\circ} & 0 & 1 & 0 \\ \hline 30^{\circ} & \frac{\pi}{6} & \frac{\sqrt{3}}{2} & \frac{1}{2} \\ [2pt] \hline 45^{\circ} & \frac{\pi}{4} & \frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2} \\ [2pt] \hline 60^{\circ} & \frac{\pi}{3} & \frac{1}{2} & \frac{\sqrt{3}}{2} \\ [2pt] \hline 90^{\circ} & \frac{\pi}{2} & 0 & 1 \\ [2pt] \hline \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-bbce27141f7a5fb69af663df88967f4c_l3.png "Rendered by QuickLaTeX.com")
Example 7.2.2
Example 7.2.2.1
Determine the sine and cosine of the following angles.

Solution:
Determine the sine and cosine of .
We begin by plotting in standard position and find its terminal side overshoots the negative -axis to land in Quadrant III.
Hence, we obtain ‘s reference angle by subtracting:  .
.
As is a Quadrant III angle, both  and
and  . The Reference Angle Theorem yields:
. The Reference Angle Theorem yields:
 and
and 

Example 7.2.2.2
Determine the sine and cosine of the following angles.

Solution:
Determine the sine and cosine of .
The terminal side of  , when plotted in standard position, lies in Quadrant IV, just shy of the positive -axis.
, when plotted in standard position, lies in Quadrant IV, just shy of the positive -axis.
To find ‘s reference angle , we subtract:  .
.
As is a Quadrant IV angle,  and , so the Reference Angle Theorem gives:
and , so the Reference Angle Theorem gives:
 and
and 

Example 7.2.2.3
Determine the sine and cosine of the following angles.

Solution:
Determine the sine and cosine of .
To plot  , we rotate clockwise an angle of
, we rotate clockwise an angle of  from the positive -axis. The terminal side of , therefore, lies in Quadrant II making an angle of
from the positive -axis. The terminal side of , therefore, lies in Quadrant II making an angle of  radians with respect to the negative -axis.
radians with respect to the negative -axis.
As is a Quadrant II angle, and  so the Reference Angle Theorem gives:
so the Reference Angle Theorem gives:
 and
and 

Example 7.2.2.4
Determine the sine and cosine of the following angles.

Solution:
Determine the sine and cosine of .
Given the angle measures more than  , we find the terminal side of by rotating one full revolution followed by an additional
, we find the terminal side of by rotating one full revolution followed by an additional  radians.
radians.
Hence, and have the same terminal side,[10] and so
 and
and 

A couple of remarks are in order. First off, the reader may have noticed that when expressed in radian measure, the reference angle for a non-quadrantal angle is easy to spot. Reduced fraction multiples of  with a denominator of
with a denominator of  have as a reference angle, those with a denominator of
have as a reference angle, those with a denominator of  have
have  as their reference angle, and those with a denominator of
as their reference angle, and those with a denominator of  have
have  as their reference angle.[11]
as their reference angle.[11]
Also note in number 4 of the last example, the angles and  are coterminal. As a result, have the same values for sine and cosine. It turns out that we can characterize coterminal angles in this manner, as stated below.
are coterminal. As a result, have the same values for sine and cosine. It turns out that we can characterize coterminal angles in this manner, as stated below.
![\[\cos(\alpha) = \cos(\beta) \text{ and } \sin(\alpha) = \sin(\beta)\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-1dc459512d015ebc2f50c0d502f215f4_l3.png "Rendered by QuickLaTeX.com")
Recall the phraseology `if and only if’ means there are two things to argue in Theorem 7.3: first, if and are co-terminal, then  and
and  . This is immediate as coterminal share terminal sides, and, in particular, the (unique) point on the Unit Circle shared by said terminal side. Second, we need to argue that if and , then and are coterminal.
. This is immediate as coterminal share terminal sides, and, in particular, the (unique) point on the Unit Circle shared by said terminal side. Second, we need to argue that if and , then and are coterminal.
To prove this second claim, note that when an angle is drawn in standard position, the terminal side of the angle is the ray that starts at the origin and is completely determined by any other point on the terminal side. If and , then their terminal sides share a point on the Unit Circle, namely  . Hence, and are coterminal.
. Hence, and are coterminal.
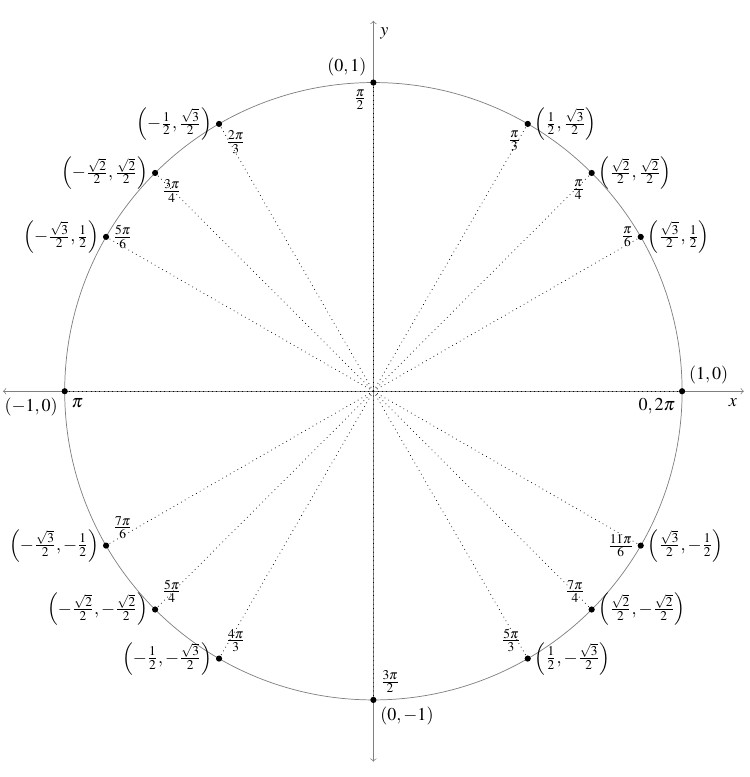
The Reference Angle Theorem in conjunction with the table of sine and cosine values given previously can be used to generate the figure below. We recommend committing it to memory.
Example 7.2.3
Example 7.2.3.1
Suppose is an acute angle with  .
.
Determine  and use this to plot in standard position.
and use this to plot in standard position.
Solution:
Suppose is an acute angle with . Determine and use this to plot in standard position.
Given is an acute angle, we know  , so the terminal side of lies in Quadrant I.
, so the terminal side of lies in Quadrant I.
Moreover, because , we know the -coordinate of the intersection point of the terminal side of and the Unit Circle is  .
.
To find , we need the -coordinate. Taking a cue from Example 7.2.1, we drop a perpendicular from the terminal side of to the -axis as seen below on the right to form a right triangle with one leg measuring units and hypotenuse with a length of unit.
The Pythagorean Theorem gives  or
or  .
.
Hence,  .
.

Example 7.2.3.2a
Suppose is an acute angle with .
State the sine and cosine of the following angles:

Solution:
State the sine and cosine of .
To find the cosine and sine of , we first plot in standard position.
We can imagine the sum of the angles  as a sequence of two rotations: a rotation of radians followed by a rotation of radians.[12] We see that is the reference angle for .
as a sequence of two rotations: a rotation of radians followed by a rotation of radians.[12] We see that is the reference angle for .
By The Reference Angle Theorem,  and
and  . As the terminal side of falls in Quadrant III, both and are negative, so
. As the terminal side of falls in Quadrant III, both and are negative, so
 and
and 

Example 7.2.3.2b
Suppose is an acute angle with .
State the sine and cosine of the following angles:

Solution:
State the sine and cosine of .
Rewriting as  , we can plot by visualizing one complete revolution counter-clockwise followed by a clockwise revolution, or `backing up,’ of radians. Once again, we see that is ‘s reference angle.
, we can plot by visualizing one complete revolution counter-clockwise followed by a clockwise revolution, or `backing up,’ of radians. Once again, we see that is ‘s reference angle.
Because is a Quadrant IV angle, we choose the appropriate signs and get:
 and
and  .
.

Example 7.2.3.2c
Suppose is an acute angle with .
State the sine and cosine of the following angles:

Solution:
State the sine and cosine of .
Taking a cue from the previous problem, we rewrite as  . The angle
. The angle  represents one and a half revolutions counter-clockwise, so that when we `back up’ radians, we end up in Quadrant II.
represents one and a half revolutions counter-clockwise, so that when we `back up’ radians, we end up in Quadrant II.
As is the reference angle for , The Reference Angle Theorem gives
 and
and  .
.

Example 7.2.3.2d
Suppose is an acute angle with .
State the sine and cosine of the following angles:

Solution:
State the sine and cosine of .
To plot , we first rotate  radians and follow up with radians. The reference angle here is not , so The Reference Angle Theorem is not immediately applicable. (It’s important that you see why this is the case. Take a moment to think about this before reading on.)
radians and follow up with radians. The reference angle here is not , so The Reference Angle Theorem is not immediately applicable. (It’s important that you see why this is the case. Take a moment to think about this before reading on.)
Let  be the point on the terminal side of which lies on the Unit Circle so that
be the point on the terminal side of which lies on the Unit Circle so that  and
and  . Once we graph in standard position, we use the fact from Geometry that equal angles subtend equal chords to show that the dotted lines in the figure below are equal.
. Once we graph in standard position, we use the fact from Geometry that equal angles subtend equal chords to show that the dotted lines in the figure below are equal.
Hence,  . Similarly, we find
. Similarly, we find  .
.

A couple of remarks about Example 7.2.3 are in order. First, we note the right triangle we used to find is a scaled 5-12-13 triangle. Recognizing this Pythagorean Triple[13] may have simplified our workflow. Along the same lines, because, the Unit Circle, by definition, is described by the equation  , we could substitute
, we could substitute  in order to find . We leave it to the reader to show we get the exact same answer regardless of the approach used.
in order to find . We leave it to the reader to show we get the exact same answer regardless of the approach used.
Our next example turns the tables and makes good use of the Unit Circle values given previously as well as Theorem 7.3 in a different way: instead of giving information about the angle and asking for sine or cosine values, we are given sine or cosine values and asked to produce the corresponding angles. In other words, we solve some rudimentary equations involving sine and cosine.[14]
Example 7.2.4
Example 7.2.4.1
Determine all angles that satisfy the following equations. Express your answers in radians.[15]

Solution:
Determine all angles that satisfy .
If  , then we know the terminal side of , when plotted in standard position, intersects the Unit Circle at
, then we know the terminal side of , when plotted in standard position, intersects the Unit Circle at  . This means is a Quadrant I or IV angle.
. This means is a Quadrant I or IV angle.
Because , we know from the values on the given Unit Circle that the reference angle is .

One solution in Quadrant I is  .
.
Per Theorem 7.3, all other Quadrant I solutions must be coterminal with . Recall from Section 7.1.2, two angles in radian measure are coterminal if and only if they differ by an integer multiple of  . Hence to describe all angles coterminal with a given angle, we add
. Hence to describe all angles coterminal with a given angle, we add  for integers
for integers  ,
,  ,
,  , \dots. Hence, we record our final answer as
, \dots. Hence, we record our final answer as  for integers
for integers  .
.
Proceeding similarly for the Quadrant IV case, we find the solution to here is  , so our answer in this Quadrant is
, so our answer in this Quadrant is  for integers .
for integers .
Example 7.2.4.2
Determine all angles that satisfy the following equations. Express your answers in radians.

Solution:
Determine all angles that satisfy .
If  , then when is plotted in standard position, its terminal side intersects the Unit Circle at
, then when is plotted in standard position, its terminal side intersects the Unit Circle at  . From this, we determine is a Quadrant III or Quadrant IV angle with reference angle .
. From this, we determine is a Quadrant III or Quadrant IV angle with reference angle .
In Quadrant III, one solution is  , so we capture all Quadrant III solutions by adding integer multiples of :
, so we capture all Quadrant III solutions by adding integer multiples of :  .
.
In Quadrant IV, one solution is  so all the solutions here are of the form
so all the solutions here are of the form  for integers .
for integers .

Example 7.2.4.3
Determine all angles that satisfy the following equations. Express your answers in radians.

Solution:
Determine all angles that satisfy .
If , then the terminal side of must lie on the line  , also known as the -axis.
, also known as the -axis.

While, technically speaking, isn’t a reference angle (it’s not acute), we can nonetheless use it to find our answers.
If we follow the procedure set forth in the previous examples, we find  and
and  for integers, .
for integers, .
While this solution is correct, it can be shortened to  for integers . The reader is encouraged to see the geometry using the diagram above on the left.
for integers . The reader is encouraged to see the geometry using the diagram above on the left.
Example 7.2.4.4
Determine all angles that satisfy the following equations. Express your answers in radians.

Solution:
Determine all angles that satisfy .
We are asked to solve  . As sine values are -coordinates on the Unit Circle,
. As sine values are -coordinates on the Unit Circle,  can’t be any larger than . Hence,
can’t be any larger than . Hence,  has no solutions.
has no solutions.
One of the key items to take from Example 7.2.4 is that, in general, solutions to trigonometric equations consist of infinitely many answers. This is especially important when checking answers to the exercises.
For example, another Quadrant IV solution to  is
is  . Hence, the family of Quadrant IV answers to number 2 in the last example could just have easily been written
. Hence, the family of Quadrant IV answers to number 2 in the last example could just have easily been written  for integers . While on the surface, this family may look different than the stated solution of
for integers . While on the surface, this family may look different than the stated solution of  for integers , we leave it to the reader to show they represent the same list of angles.
for integers , we leave it to the reader to show they represent the same list of angles.
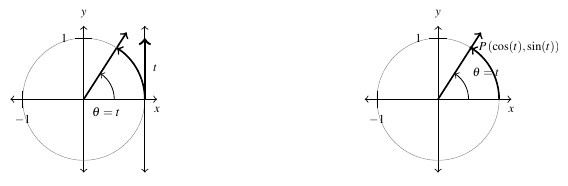
It is also worth noting that when asked to solve equations in algebra, we are usually looking for real number solutions. Thanks to the work we did previously on the identifications, we are able to regard the inputs to the sine and cosine functions as real numbers by identifying any real number  with an oriented angle measuring
with an oriented angle measuring  radians. That is, for each real number , we associate an oriented arc units in length with initial point
radians. That is, for each real number , we associate an oriented arc units in length with initial point  and endpoint
and endpoint  .
.
In practice this means in expressions like ` ‘ and `
‘ and ` ,’ the inputs can be thought of as either angles in radian measure or real numbers, whichever is more convenient.
,’ the inputs can be thought of as either angles in radian measure or real numbers, whichever is more convenient.
Suppose, as in the Exercises, we are asked to find all real number solutions to the equation such as  . The discussion above allows us to find the real number solutions to this equation by thinking in angles. Indeed, we would solve this equation in the exact way we solved in Example 7.2.4 number 2. Our solution is only cosmetically different in that the variable used is rather than :
. The discussion above allows us to find the real number solutions to this equation by thinking in angles. Indeed, we would solve this equation in the exact way we solved in Example 7.2.4 number 2. Our solution is only cosmetically different in that the variable used is rather than :  or
or  for integers, .
for integers, .
We will study the sine and cosine functions in greater detail in Section 7.3. Until then, keep in mind that any properties of the sine and cosine functions developed in the following sections which regard them as functions of angles in radian measure apply equally well if the inputs are regarded as real numbers.
7.2.3 Beyond the Unit Circle
In Definition 7.3, we define the sine and cosine functions using the Unit Circle,  . It turns out that we can use any circle centered at the origin to determine the sine and cosine values of angles. To show this, we essentially recycle the same similarity arguments used in Section 7.2.1 to show the trigonometric ratios described in Definition 7.2 are independent of the choice of right triangle used.[16]
. It turns out that we can use any circle centered at the origin to determine the sine and cosine values of angles. To show this, we essentially recycle the same similarity arguments used in Section 7.2.1 to show the trigonometric ratios described in Definition 7.2 are independent of the choice of right triangle used.[16]
Consider for the moment the acute angle drawn below in standard position. Let be the point on the terminal side of which lies on the circle  , and let
, and let  be the point on the terminal side of which lies on the Unit Circle. Now consider dropping perpendiculars from and to create two right triangles,
be the point on the terminal side of which lies on the Unit Circle. Now consider dropping perpendiculars from and to create two right triangles,  and
and  . These triangles are similar,[17] thus it follows that
. These triangles are similar,[17] thus it follows that  , so
, so  and, similarly, we find
and, similarly, we find  . Because, by definition,
. Because, by definition,  and
and  , we get the coordinates of to be
, we get the coordinates of to be  and
and  . By reflecting these points through the -axis, -axis and origin, we obtain the result for all non-quadrantal angles , and we leave it to the reader to verify these formulas hold for the quadrantal angles as well.
. By reflecting these points through the -axis, -axis and origin, we obtain the result for all non-quadrantal angles , and we leave it to the reader to verify these formulas hold for the quadrantal angles as well.
Not only can we describe the coordinates of in terms of and but due to the fact that the radius of the circle is  , we can also express and in terms of the coordinates of . These results are summarized in the following theorem.
, we can also express and in terms of the coordinates of . These results are summarized in the following theorem.
Theorem 7.4
If is the point on the terminal side of an angle , plotted in standard position, which lies on the circle then and . Moreover,
![\[\begin{array}{ccc} \cos(\theta)= \dfrac{x}{r} = \dfrac{x}{\sqrt{x^2+y^2}} & \text{and} & \sin(\theta) = \dfrac{y}{r} = \dfrac{y}{\sqrt{x^2+y^2}} \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-2fa835e69d3c72f91d4f92dd70f63daa_l3.png "Rendered by QuickLaTeX.com")
Note that in the case of the Unit Circle we have  , so Theorem 7.4 reduces to our definitions of and in Definition 7.3. Our next example makes good use of Theorem 7.4.
, so Theorem 7.4 reduces to our definitions of and in Definition 7.3. Our next example makes good use of Theorem 7.4.
Example 7.2.5
Example 7.2.5.1
Suppose that the terminal side of an angle , when plotted in standard position, contains the point  . Compute and .
. Compute and .
Solution:
Suppose that the terminal side of an angle , when plotted in standard position, contains the point . Compute and .
We are given both the and coordinates of a point on the terminal side of this angle, so we can use Theorem7.4 directly. First, we find
![\[ \begin{array}{rcl} r &=& \sqrt{x^2+y^2} \\ &=& \sqrt{(-2)^2+4^2} \\ &=& \sqrt{20} \\ &=& 2\sqrt{5} \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-40981cb69579cde80bff2d69d9c6bb1e_l3.png "Rendered by QuickLaTeX.com")
This means the point lies on a circle of radius  units.
units.
Hence,  and
and  .
.

Example 7.2.5.2
Suppose  with
with  . Compute .
. Compute .
Solution:
Suppose with . Compute .
We are told , so, in particular, is a Quadrant II angle.
Per Theorem 7.4,  where is the -coordinate of the intersection point of the circle and the terminal side of (when plotted in standard position, of course!) For convenience, we choose
where is the -coordinate of the intersection point of the circle and the terminal side of (when plotted in standard position, of course!) For convenience, we choose  so that
so that  , and we get the diagram.
, and we get the diagram.
Given , we get  . We find
. We find  , and because is a Quadrant II angle, we get
, and because is a Quadrant II angle, we get  .
.
Hence,  .
.

Example 7.2.5.3
In Example 7.1.5 in Section 7.1.2, we approximated the radius of the earth at  north latitude to be
north latitude to be  miles. Justify this approximation if the spherical radius of the Earth is
miles. Justify this approximation if the spherical radius of the Earth is  miles.
miles.
Solution:
In Example 7.1.5 in Section 7.1.2, we approximated the radius of the earth at north latitude to be miles. Justify this approximation if the spherical radius of the Earth is miles.
Recall the diagram below on the left indicating the circles which are the parallels of latitude.[18]
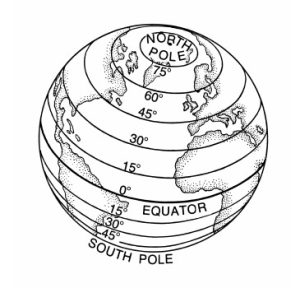

Assuming the Earth is a sphere of radius miles, a cross-section through the poles produces a circle of radius miles. Viewing the Equator as the -axis, the value we seek is the -coordinate of the point indicated in the figure above on the right. Using Theorem 7.4, we get  . Hence, the radius of the Earth at North Latitude is approximately miles.
. Hence, the radius of the Earth at North Latitude is approximately miles.
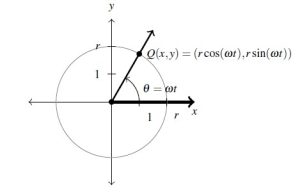
Theorem 7.4 gives us what we need to `circle back’ to the question posed at the the beginning of the section: how to describe the position of an object traveling in a circular path of radius with constant angular velocity  . Suppose that at time , the object has swept out an angle measuring radians. If we assume that the object is at the point
. Suppose that at time , the object has swept out an angle measuring radians. If we assume that the object is at the point  when
when  , the angle is in standard position. By definition,
, the angle is in standard position. By definition,  which we rewrite as
which we rewrite as  . According to Theorem 7.4, the location of the object on the circle is found using the equations
. According to Theorem 7.4, the location of the object on the circle is found using the equations  and
and  . Hence, at time , the object is at the point
. Hence, at time , the object is at the point  , as seen in the diagram below.
, as seen in the diagram below.
We have just argued the following.
Equation 7.3
Suppose an object is traveling in a circular path of radius centered at the origin with constant angular velocity . If corresponds to the point , then the and coordinates of the object are functions of and are given by  and
and  . Here,
. Here,  indicates a counter-clockwise direction and
indicates a counter-clockwise direction and  indicates a clockwise direction.
indicates a clockwise direction.
Example 7.2.6
Example 7.2.6
Suppose we are in the situation of Example 7.1.5. Determine the equations of motion of Lakeland Community College as the earth rotates.
Solution:
From Example 7.1.5, we take  miles and and
miles and and  .
.
Hence, the equations of motion are
![\[x = r \cos(\omega t) = 2960 \cos\left(\frac{\pi}{12} t\right) \text{ and } y = r \sin(\omega t) = 2960 \sin\left(\frac{\pi}{12} t\right), \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-08769cdf5281829822eda6b92c825670_l3.png "Rendered by QuickLaTeX.com")
where and are measured in miles and is measured in hours.
7.2.4 Section Exercises
In Exercises 1 – 4, compute the requested quantities.
- Determine , , and .

- Determine , , and .

- Find , , and .

- Find , , and .

In Exercises 5 – 7, answer the following questions assuming is an angle in a right triangle.
- If
 and the hypotenuse has length
and the hypotenuse has length  , how long is the side opposite ?
, how long is the side opposite ? - If
 and the side opposite has length
and the side opposite has length  , how long is the hypotenuse?
, how long is the hypotenuse? - If
 and the hypotenuse has length
and the hypotenuse has length  , how long is the side adjacent to ?
, how long is the side adjacent to ?
In Exercises 8 – 27, determine the exact value of the cosine and sine of the given angle.




















In Exercises 28 – 36, compute all of the angles which satisfy the given equation.









In Exercises 37 – 45, solve the equation for . (See the remarks in 7.2.2.)









In Exercises 46 – 49, let be the angle in standard position whose terminal side contains the given point then compute and .




In Exercises 50 – 59, use the results developed throughout the section to find the requested value.
- If
 with in Quadrant IV, what is ?
with in Quadrant IV, what is ? - If
 with in Quadrant I, what is ?
with in Quadrant I, what is ? - If
 with in Quadrant II, what is ?
with in Quadrant II, what is ? - If
 with in Quadrant III, what is ?
with in Quadrant III, what is ? - If
 with in Quadrant III, what is ?
with in Quadrant III, what is ? - If
 with in Quadrant IV, what is ?
with in Quadrant IV, what is ? - If
 and
and  , what is ?
, what is ? - If
 and
and  , what is ?
, what is ? - If
 and
and  , what is ?
, what is ? - If
 and , what is ?
and , what is ?
In Exercises 60 – 64, write the given function as a nontrivial decomposition of functions as directed.
- For
 , find functions
, find functions  and so that
and so that  .
. - For
 , find functions and so that
, find functions and so that  .
. - For
 , find functions and so that
, find functions and so that  .
. - For
 , find functions
, find functions  and so
and so  .
. - For
 , find functions and so
, find functions and so  .
. - For each function
 listed below, compute the average rate of change over the indicated interval.[19] What trends do you notice? Be sure your calculator is in radian mode!
listed below, compute the average rate of change over the indicated interval.[19] What trends do you notice? Be sure your calculator is in radian mode! ![\[ \begin{array}{|r||c|c|c|} \hline S(t) & [-0.1, 0.1] & [-0.01, 0.01] &[-0.001, 0.001] \\ \hline \sin(t) &&& \\ \hline \sin(2t) &&& \\ \hline \sin(3t) &&& \\ \hline \sin(4t) &&& \\ \hline \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-6af8bf555014f6516d8f6b6298e3e13a_l3.png "Rendered by QuickLaTeX.com")
In Exercises 66 – 69, find the equations of motion for the given scenario. Assume that the center of the motion is the origin, the motion is counter-clockwise and that  corresponds to a position along the positive -axis. (See Equation 7.3 and Example 7.1.5.)
corresponds to a position along the positive -axis. (See Equation 7.3 and Example 7.1.5.)
- A point on the edge of the spinning yo-yo in Exercise 50 from Section 7.1.2.Recall: The diameter of the yo-yo is 2.25 inches and it spins at 4500 revolutions per minute.
- The yo-yo in exercise 52 from Section 7.1.2.Recall: The radius of the circle is 28 inches and it completes one revolution in 3 seconds.
- A point on the edge of the hard drive in Exercise 53 from Section 7.1.2.Recall: The diameter of the hard disk is 2.5 inches and it spins at 7200 revolutions per minute.
- A passenger on the Big Wheel in Exercise 55 from Section 7.1.2.Recall: The diameter is 128 feet and completes 2 revolutions in 2 minutes, 7 seconds.
- Consider the numbers: 0, 1, 2, 3, 4. Take the square root of each of these numbers, then divide each by 2. The resulting numbers should look hauntingly familiar.
- In this section, we saw that the sine and cosine functions of angles can be considered functions of real numbers. With help from your classmates, discuss the domains and ranges of
 and
and  . Write your answers using interval notation.
. Write your answers using interval notation. - Another way to establish Theorem 7.4 is to use transformations. Transform the Unit Circle, , to
 using horizontal and vertical stretches. Show if the coordinates on the Unit Circle are , then the corresponding coordinates on are
using horizontal and vertical stretches. Show if the coordinates on the Unit Circle are , then the corresponding coordinates on are  .
. - In the scenario of Equation 7.3, we assumed that at , the object was at the point . If this is not the case, we can adjust the equations of motion by introducing a `time delay.’ If
 is the first time the object passes through the point , show, with the help of your classmates, the equations of motion are
is the first time the object passes through the point , show, with the help of your classmates, the equations of motion are  and
and  .
.
Section 7.2 Exercise Answers can be found in the Appendix … Coming soon
- Including one by Mentor, Ohio native President James Garfield. ↵
- We will prove this in Section 8.5 by generalizing the Pythagorean Theorem to a formula that works for all triangles. ↵
- That is, a triangle with the same `shape' - that is, the same angles. ↵
- We will do a little of this in Section 8.2. ↵
- See Definition 1.3 in Section 1.2. ↵
- See Section 1.1. ↵
- The etymology of the name `sine' is quite colorful, and the interested reader is invited to research it; the `co' in `cosine' is related to the concept of `co'mplementary angles (see Sections 7.1 and 7.2.1) and is explained in detail in Section 8.2. ↵
- For instance, Definition 7.2 in Section 7.2.1. ↵
- Do you see why? ↵
- Recall we say they are `coterminal.' ↵
- For once, we have something convenient about using radian measure in contrast to the abstract theoretical nonsense about using them as a `natural' way to match oriented angles with real numbers! ↵
- Because
 , may be plotted by reversing the order of rotations given here. You should do this. ↵
, may be plotted by reversing the order of rotations given here. You should do this. ↵ - See Section 7.2.1 for more examples of Pythagorean Triples. ↵
- We will study equations in more detail in Section 8.3.2. ↵
- This ensures we keep building the `fluency with radians' which is so necessary for later work. ↵
- Another approach uses transformations. See Exercise 72. ↵
- Do you remember why? ↵
- Diagram credit: Pearson Scott Foresman [Public domain], via Wikimedia Commons. ↵
- See Definition 1.11 in Section 1.3.4 for a review of this concept, as needed. ↵

![Pearson Scott Foresman [Public domain], via Wikimedia Commons](https://commons.wikimedia.org/wiki/File:Latitude_(PSF).png){kind=link}