8.2 Other Trigonometric Identities
In Section 8.1, we saw the utility of identities in finding the values of the circular functions of a given angle as well as simplifying expressions involving the circular functions. In this section, we introduce several collections of identities which have uses in this course and beyond.
Our first set of identities is the `Even/Odd’ identities. We observed the even and odd properties of the circular functions graphically in Sections 7.3 and 7.5. Here, we take the time to prove these properties from first principles. We state the theorem below for reference.




We start by proving  and
and  .
.
Consider an angle  plotted in standard position. Let
plotted in standard position. Let  be the angle coterminal with with
be the angle coterminal with with  . (We can construct the angle by rotating counter-clockwise from the positive
. (We can construct the angle by rotating counter-clockwise from the positive  -axis to the terminal side of as pictured below.) and are coterminal, so
-axis to the terminal side of as pictured below.) and are coterminal, so  and
and 

We now consider the angles  and
and  . As is coterminal with
. As is coterminal with  , there is some integer
, there is some integer  such that
such that  . Hence,
. Hence,  . Because is an integer, so is
. Because is an integer, so is  , which means is coterminal with . Therefore,
, which means is coterminal with . Therefore,  and
and 
Let  and
and  denote the points on the terminal sides of and
denote the points on the terminal sides of and  , respectively, which lie on the Unit Circle. By definition, the coordinates of are
, respectively, which lie on the Unit Circle. By definition, the coordinates of are  and the coordinates of are
and the coordinates of are 
Because and sweep out congruent central sectors of the Unit Circle, it follows that the points and are symmetric about the -axis. Thus,  and
and 
The cosines and sines of and are the same as those for and , respectively, thus we get and , as required.
As we saw in Section 7.5, the remaining four circular functions `inherit’ their even/odd nature from sine and cosine courtesy of the Reciprocal and Quotient Identities, Theorem 8.1.
Our next set of identities establish how the cosine function handles sums and differences of angles.
We first prove the result for differences. As in the proof of the Even / Odd Identities, we can reduce the proof for general angles  and
and  to angles
to angles  and
and  , coterminal with and , respectively, each of which measure between
, coterminal with and , respectively, each of which measure between  and
and  radians. Because and are coterminal, as are and , it follows that
radians. Because and are coterminal, as are and , it follows that  is coterminal with
is coterminal with  . Consider the case below where
. Consider the case below where  .
.
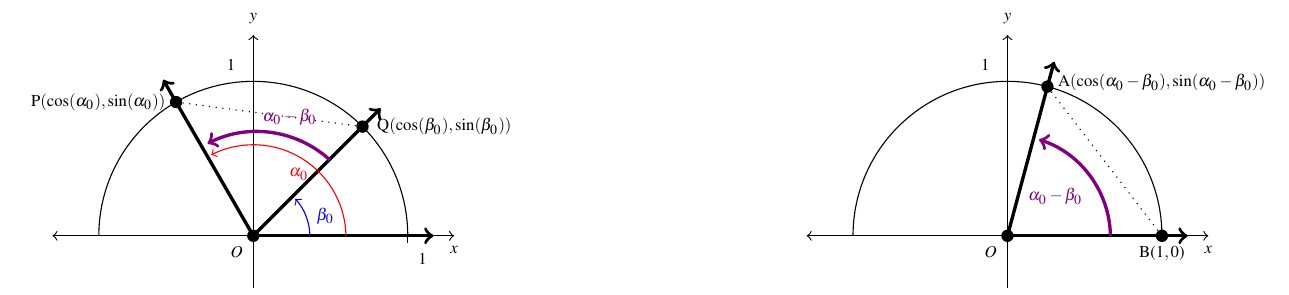
Because the angles  and
and  are congruent, the distance between and is equal to the distance between
are congruent, the distance between and is equal to the distance between  and
and  .[1] The distance formula, Equation 1.1, yields
.[1] The distance formula, Equation 1.1, yields
![\[ \begin{array}{rcl} \sqrt{(\cos(\alpha_{0}) - \cos(\beta_{0}))^2 + (\sin(\alpha_{0}) - \sin(\beta_{0}))^2 } & = & \sqrt{(\cos(0} - \beta_{0}) - 1)^2 + (\sin(\alpha_{0} - \beta_{0}) - 0)^2} \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-c49ed8727e48a78bbe6c84dcdf82493c_l3.png "Rendered by QuickLaTeX.com")
Squaring both sides, we expand the left hand side of this equation as
![\[ \begin{array}{rcl} (\cos(\alpha_{0}) - \cos(\beta_{0}))^2 + (\sin(\alpha_{0}) - \sin(\beta_{0}))^2 & = & \cos^2(\alpha_{0}) - 2\cos(\alpha_{0})\cos(\beta_{0}) + \cos^2(\beta_{0}) \\ & & + \sin^2(\alpha_{0}) - 2\sin(\alpha_{0})\sin(\beta_{0}) + \sin^2(\beta_{0}) \\ [6pt] & = & \cos^2(\alpha_{0}) + \sin^2(\alpha_{0}) + \cos^2(\beta_{0}) + \sin^2(\beta_{0}) \\ & & - 2\cos(\alpha_{0})\cos(\beta_{0}) - 2\sin(\alpha_{0})\sin(\beta_{0}) \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-ea0074695574c03db98d10ba0f468847_l3.png "Rendered by QuickLaTeX.com")
From the Pythagorean Identities,  and
and  , so
, so
![\[ \begin{array}{rcl} (\cos(\alpha_{0}) - \cos(\beta_{0}))^2 + (\sin(\alpha_{0}) - \sin(\beta_{0}))^2 & = & 2 - 2\cos(\alpha_{0})\cos(\beta_{0}) - 2\sin(\alpha_{0})\sin(\beta_{0}) \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-95496d58227c141c018b8f71f5e6e421_l3.png "Rendered by QuickLaTeX.com")
Turning our attention to the right hand side of our equation, we find
![\[ \begin{array}{rcl} (\cos(\alpha_{0} - \beta_{0}) - 1)^2 + (\sin(\alpha_{0} - \beta_{0}) - 0)^2 & = & \cos^2(\alpha_{0} - \beta_{0}) - 2\cos(\alpha_{0} - \beta_{0}) + 1 + \sin^2(\alpha_{0} - \beta_{0}) \\ & = & 1 + \cos^2(\alpha_{0} - \beta_{0}) + \sin^2(\alpha_{0} - \beta_{0}) - 2\cos(\alpha_{0} - \beta_{0}) \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-6b60e09a2e6eb47f737cc14c4954f0b0_l3.png "Rendered by QuickLaTeX.com")
Once again, we simplify  , so that
, so that
![\[ \begin{array}{rcl} (\cos(\alpha_{0} - \beta_{0}) - 1)^2 + (\sin(\alpha_{0} - \beta_{0}) - 0)^2 & = & 2 - 2\cos(\alpha_{0} - \beta_{0}) \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4c610412b9ae12e2b7b8a55402441cea_l3.png "Rendered by QuickLaTeX.com")
Putting it all together, we get  , which simplifies to:
, which simplifies to:  .
.
Given and , and , and and  are all coterminal pairs of angles, we have established the identity:
are all coterminal pairs of angles, we have established the identity:  .
.
For the case where  , we can apply the above argument to the angle
, we can apply the above argument to the angle  to obtain the identity
to obtain the identity  . Using this formula in conjunction with the Even Identity of cosine gives us the result in this case, too:
. Using this formula in conjunction with the Even Identity of cosine gives us the result in this case, too:
![\[ \begin{array}{rcl} \cos(\alpha_{0} - \beta_{0}) = \cos( - (\alpha_{0} - \beta_{0})) = \cos(\beta_{0} - \alpha_{0}) & = & \cos(\beta_{0})\cos(\alpha_{0}) + \sin(\beta_{0})\sin(\alpha_{0}) \\ & = & \cos(\alpha_{0})\cos(\beta_{0}) + \sin(\alpha_{0})\sin(\beta_{0}). \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-067f25429f538eed35bbb170ee82e180_l3.png "Rendered by QuickLaTeX.com")
To get the sum identity for cosine, we use the difference formula along with the Even/Odd Identities
![\[ \cos(\alpha + \beta) = \cos(\alpha - (-\beta)) = \cos(\alpha) \cos(-\beta) + \sin(\alpha) \sin(-\beta) = \cos(\alpha) \cos(\beta) - \sin(\alpha) \sin(\beta). \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4de689c284c041687d3fc109ab597dfc_l3.png "Rendered by QuickLaTeX.com")
We put these newfound identities to good use in the following example.
Example 8.2.1
Example 8.2.1.1
Compute the exact value of  .
.
Solution:
Compute the exact value of 
In order to use Theorem 8.5 to find , we need to write  as a sum or difference of angles whose cosines and sines we know. One way to do so is to write
as a sum or difference of angles whose cosines and sines we know. One way to do so is to write  . We find:
. We find:
![\[ \begin{array}{rcl} \cos\left(15^{\circ}\right) & = & \cos\left(45^{\circ} - 30^{\circ} \right) \\ [2pt] & = & \cos\left(45^{\circ}\right)\cos\left(30^{\circ} \right) + \sin\left(45^{\circ}\right)\sin\left(30^{\circ} \right) \\ [2pt] & = & \left( \dfrac{\sqrt{2}}{2} \right)\left( \dfrac{\sqrt{3}}{2} \right) + \left( \dfrac{\sqrt{2}}{2} \right)\left( \dfrac{1}{2} \right)\\ [15pt] & = & \dfrac{\sqrt{6}+ \sqrt{2}}{4}. \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b38609dcb46583b3deee73676396734f_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.1.2
Verify the identity:  .
.
Solution:
Verify the identity: 
Using Theorem 8.5 gives:
![\[ \begin{array}{rcl} \cos\left(\dfrac{\pi}{2} - \theta\right) & = & \cos\left(\dfrac{\pi}{2}\right)\cos\left(\theta\right) + \sin\left(\dfrac{\pi}{2}\right)\sin\left(\theta \right) \\ [10pt] & = & \left( 0 \right)\left( \cos(\theta) \right) + \left( 1 \right)\left( \sin(\theta) \right) \\ [4pt] & = & \sin(\theta) . \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-0741f6af69c827e862c6d0ad4ccaf4ed_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.1.3
Suppose is a Quadrant I angle with  and is a Quadrant IV angle with
and is a Quadrant IV angle with  . Determine the exact value of
. Determine the exact value of  .
.
Solution:
Suppose is a Quadrant I angle with and is a Quadrant IV angle with . Determine the exact value of 
Per Theorem 8.5, we know  . Hence, we need to find the sines and cosines of and to complete the problem.
. Hence, we need to find the sines and cosines of and to complete the problem.
We are given , so our first task is to find  . We can quickly get using the Pythagorean Identity
. We can quickly get using the Pythagorean Identity  . We get
. We get  , choosing the positive root because is a Quadrant I angle.
, choosing the positive root because is a Quadrant I angle.
Next, we need the  and
and  . , so we immediately get
. , so we immediately get  courtesy of the Reciprocal and Quotient Identities.
courtesy of the Reciprocal and Quotient Identities.
To get , we employ the Pythagorean Identity:  Here, as is a Quadrant IV angle, we get
Here, as is a Quadrant IV angle, we get 
Finally, we get:
![\[ \begin{array}{rcl} \cos(\alpha + \beta) &=& \cos(\alpha) \cos(\beta) - \sin(\alpha) \sin(\beta) \\[4pt] &=& \left( \frac{4}{5} \right) \left( \frac{1}{4} \right) - \left( \frac{3}{5} \right) \left( - \frac{\sqrt{15}}{4} \right)\\[4pt] &=& \frac{4+3\sqrt{15}}{20} \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4918578a4081b97dbe529b5ebeec7b8b_l3.png "Rendered by QuickLaTeX.com")
The identity verified in Example 8.2.1, namely, , is the first of the celebrated `cofunction’ identities.
From  , we get:
, we get: ![\sin\left(\frac{\pi}{2} - \theta\right) = \cos\left(\frac{\pi}{2} -\left[\frac{\pi}{2} - \theta\right]\right) = \cos(\theta)](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-6b31d78231525fe3d20ecb39df7394c0_l3.png "Rendered by QuickLaTeX.com") , which says, in words, that the `co’sine of an angle is the sine of its `co’mplement. Now that these identities have been established for cosine and sine, the remaining circular functions follow suit. The remaining proofs are left as exercises.
, which says, in words, that the `co’sine of an angle is the sine of its `co’mplement. Now that these identities have been established for cosine and sine, the remaining circular functions follow suit. The remaining proofs are left as exercises.






The Cofunction Identities enable us to derive the sum and difference formulas for sine. We first convert to sine to cosine and expand:
![\[ \begin{array}{rcl} \sin(\alpha + \beta) & = & \cos\left( \dfrac{\pi}{2} - (\alpha + \beta) \right) \\ [10pt] & = & \cos\left( \left[\dfrac{\pi}{2} - \alpha \right] - \beta \right) \\ [10pt] & = & \cos\left(\dfrac{\pi}{2} - \alpha \right) \cos(\beta) + \sin\left(\dfrac{\pi}{2} - \alpha \right)\sin(\beta) \\ [10pt] & = & \sin(\alpha) \cos(\beta) + \cos(\alpha) \sin(\beta) \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-11041177513d91f5cc73abac291a9b26_l3.png "Rendered by QuickLaTeX.com")
We can derive the difference formula for sine by rewriting  as
as  and using the sum formula and the Even / Odd Identities. Again, we leave the details to the reader.
and using the sum formula and the Even / Odd Identities. Again, we leave the details to the reader.


We try out these new identities in the next example.
Example 8.2.2
Example 8.2.2.1
Compute the exact value of 
Solution:
Compute the exact value of 
As in Example 8.2.1, we need to write the angle  as a sum or difference of common angles. The denominator of
as a sum or difference of common angles. The denominator of  suggests a combination of angles with denominators
suggests a combination of angles with denominators  and
and  . One such combination[2] is
. One such combination[2] is  . Applying Theorem 8.7, we get
. Applying Theorem 8.7, we get
![\[ \begin{array}{rcl} \sin\left(\dfrac{19 \pi}{12}\right) & = & \sin\left(\dfrac{4 \pi}{3} + \dfrac{\pi}{4} \right) \\ [10pt] & = & \sin\left(\dfrac{4 \pi}{3} \right)\cos\left(\dfrac{\pi}{4} \right) + \cos\left(\dfrac{4 \pi}{3} \right)\sin\left(\dfrac{\pi}{4} \right) \\ [10pt] & = & \left( -\dfrac{\sqrt{3}}{2} \right)\left( \dfrac{\sqrt{2}}{2} \right) + \left( -\dfrac{1}{2} \right)\left( \dfrac{\sqrt{2}}{2} \right) \\ [15pt] & = & \dfrac{-\sqrt{6}- \sqrt{2}}{4} \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e9f00595321ff430fa7aa5f312d9aeb2_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.2.2
Suppose is a Quadrant II angle with  , and is a Quadrant III angle with
, and is a Quadrant III angle with  . Compute the exact value of .
. Compute the exact value of .
Solution:
Suppose is a Quadrant II angle with , and is a Quadrant III angle with . Compute the exact value of .
In order to find using Theorem 8.7, we need to find and both and .
To find , we use the Pythagorean Identity  . We get
. We get  , the negative, here, owing to the fact that is a Quadrant II angle.
, the negative, here, owing to the fact that is a Quadrant II angle.
We now set about finding and . We have several ways to proceed at this point, but as there isn’t a direct way to get from to either or , we opt for a more geometric approach as presented in Section 7.4.
Because is a Quadrant III angle with  , we know the point
, we know the point  is on the terminal side of as illustrated.[3]
is on the terminal side of as illustrated.[3]

We find  , so per Theorem 7.10,
, so per Theorem 7.10,  and
and 
At last, we have
![\[ \begin{array}{rcl} \sin(\alpha - \beta) &=& \sin(\alpha)\cos(\beta) - \cos(\alpha)\sin(\beta)\\[4pt] &=& \left( \frac{5}{13} \right)\left( -\frac{\sqrt{5}}{5} \right) - \left( -\frac{12}{13} \right)\left( - \frac{2 \sqrt{5}}{5} \right)\\[4pt] &=& -\frac{29\sqrt{5}}{65} \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-6273bc81d035c20303081e6ebdbaf540_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.2.3
Derive a formula for  in terms of
in terms of  and
and  .
.
Solution:
Derive a formula for in terms of and .
We can start by expanding using a quotient identity and then the sum formulas
![\[ \begin{array}{rcl} \tan(\alpha + \beta) & = & \dfrac{\sin(\alpha + \beta)}{\cos(\alpha + \beta)} \\ [10pt] & = & \dfrac{\sin(\alpha) \cos(\beta) + \cos(\alpha) \sin(\beta)}{\cos(\alpha) \cos(\beta) - \sin(\alpha) \sin(\beta)} \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-3503c9368e8734c77d1be69d523832d8_l3.png "Rendered by QuickLaTeX.com")
As  and
and  , it looks as though if we divide both numerator and denominator by
, it looks as though if we divide both numerator and denominator by  we will have what we want
we will have what we want
![\[ \begin{array}{rcl} \tan(\alpha + \beta) & = & \dfrac{\sin(\alpha) \cos(\beta) + \cos(\alpha) \sin(\beta)}{\cos(\alpha) \cos(\beta) - \sin(\alpha) \sin(\beta)} \cdot\dfrac{\dfrac{1}{\cos(\alpha) \cos(\beta)}}{\dfrac{1}{\cos(\alpha) \cos(\beta)}}\\ & & \\ & = & \dfrac{\dfrac{\sin(\alpha) \cos(\beta)}{\cos(\alpha) \cos(\beta)} + \dfrac{\cos(\alpha) \sin(\beta)}{\cos(\alpha) \cos(\beta)}}{\dfrac{\cos(\alpha) \cos(\beta)}{\cos(\alpha) \cos(\beta)} - \dfrac{\sin(\alpha) \sin(\beta)}{\cos(\alpha) \cos(\beta)}}\\ & & \\ & = & \dfrac{\dfrac{\sin(\alpha) \cancel{\cos(\beta)}}{\cos(\alpha) \cancel{\cos(\beta)}} + \dfrac{\cancel{\cos(\alpha)} \sin(\beta)}{\cancel{\cos(\alpha)} \cos(\beta)}}{\dfrac{\cancel{\cos(\alpha)} \cancel{\cos(\beta)}}{\cancel{\cos(\alpha)} \cancel{\cos(\beta)}} - \dfrac{\sin(\alpha) \sin(\beta)}{\cos(\alpha) \cos(\beta)}}\\ & & \\ & = & \dfrac{\tan(\alpha) + \tan(\beta)}{1 -\tan(\alpha) \tan(\beta)} \\[-1em] \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-90df82db6bac16f7e850b162dfa6d891_l3.png "Rendered by QuickLaTeX.com")
Naturally, this formula is limited to those cases where all of the tangents are defined.
The formula developed in Exercise 8.2.2 for can be used to find a formula for  by rewriting the difference as a sum,
by rewriting the difference as a sum,  and using the odd property of tangent. (The reader is encouraged to fill in the details.) Below we summarize all of the sum and difference formulas.
and using the odd property of tangent. (The reader is encouraged to fill in the details.) Below we summarize all of the sum and difference formulas.



In the statement of Theorem 8.8, we have combined the cases for the sum ` ‘ and difference `
‘ and difference ` ‘ of angles into one formula. The convention here is that if you want the formula for the sum `‘ of two angles, you use the top sign in the formula; for the difference, `‘, use the bottom sign. For example,
‘ of angles into one formula. The convention here is that if you want the formula for the sum `‘ of two angles, you use the top sign in the formula; for the difference, `‘, use the bottom sign. For example,
![\[\tan(\alpha - \beta) = \dfrac{\tan(\alpha) - \tan(\beta)}{1 + \tan(\alpha) \tan(\beta)}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-81b27ae90e719baafb1cf42c81b984e6_l3.png "Rendered by QuickLaTeX.com")
If we set  in the sum formulas in Theorem 8.8, we obtain the following `Double Angle’ Identities:
in the sum formulas in Theorem 8.8, we obtain the following `Double Angle’ Identities:
![\cos(2\theta) = \left\{ \begin{array}{l} \cos^{2}(\theta) - \sin^{2}(\theta)\\ [5pt] 2\cos^{2}(\theta) - 1 \\ [5pt] 1-2\sin^{2}(\theta) \end{array} \right.](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f793de7790264f1207c5279fa3c311d8_l3.png "Rendered by QuickLaTeX.com")

The three different forms for  can be explained by our ability to `exchange’ squares of cosine and sine via the Pythagorean Identity. For instance, if we substitute
can be explained by our ability to `exchange’ squares of cosine and sine via the Pythagorean Identity. For instance, if we substitute  into the first formula for , we get
into the first formula for , we get  .
.
It is interesting to note that to determine the value of , only one piece of information is required: either  or
or  . To determine
. To determine  , however, it appears that we must know both and . In the next example, we show how we can find knowing just one piece of information, namely
, however, it appears that we must know both and . In the next example, we show how we can find knowing just one piece of information, namely 
Example 8.2.3
Example 8.2.3.1
Suppose  lies on the terminal side of when is plotted in standard position.
lies on the terminal side of when is plotted in standard position.
Compute and and determine the quadrant in which the terminal side of the angle  lies when it is plotted in standard position.
lies when it is plotted in standard position.
Solution:
Suppose lies on the terminal side of when is plotted in standard position. Compute and .
We sketch the terminal side of below. Using Theorem 7.4 from Section 7.2.2 with  and
and  , we find
, we find  . Hence,
. Hence,  and
and  .
.

Theorem 8.9 gives us three different formulas to choose from to find . Using the first formula,[4] we get:
![\[ \begin{array}{rcl} \cos(2\theta) &=& \cos^{2}(\theta) - \sin^{2}(\theta) \\[4pt] &=& \left(-\frac{3}{5}\right)^2 - \left(\frac{4}{5}\right)^2 \\[4pt] &=& -\frac{7}{25} \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f8a604e3373e3f9ad9e9778425f06820_l3.png "Rendered by QuickLaTeX.com")
For , we get
![\[ \begin{array}{rcl} \sin(2\theta) &=& 2 \sin(\theta) \cos(\theta) \\[4pt] &=& 2 \left(\frac{4}{5}\right)\left(-\frac{3}{5}\right) \\[4pt] &=& -\frac{24}{25} \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-799956dc232da7f497feb7444e6cda0a_l3.png "Rendered by QuickLaTeX.com")
Both cosine and sine of are negative, the terminal side of , when plotted in standard position, lies in Quadrant III. To see this more clearly, we plot the terminal side of , along with the terminal side of .

Note that in order to find the point  on the terminal side of of a circle of radius
on the terminal side of of a circle of radius  , we use Theorem 7.4 again and find
, we use Theorem 7.4 again and find
![\[ x = r \cos(2\theta) = 5 \left(-\frac{7}{25} \right) = -\frac{7}{5} \text{ and } y = r \sin(2\theta) = 5 \left(-\frac{24}{25}\right) = -\frac{24}{5} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e4218e2f862b9e31639810ba3a4e7e84_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.3.2
If  for
for  , find an expression for in terms of .
, find an expression for in terms of .
Solution:
If for , find an expression for in terms of .
If your first reaction to `‘ is `No it’s not,  !’ then you have indeed learned something, and we take comfort in that.
!’ then you have indeed learned something, and we take comfort in that.
While we have mostly used `‘ to represent the -coordinate of the point the terminal side of an angle , here, `‘ represents the quantity and our task is to express in terms of .
As a result of  , what remains is to express in terms of .
, what remains is to express in terms of .
Substituting into the Pythagorean Identity, we get  , or
, or  . Given ,
. Given ,  , and thus
, and thus  .
.
Our final answer is  .
.
Example 8.2.3.3
Verify the identity:  .
.
Solution:
Verify the identity: .
We start with the right hand side of the identity and note that  . Next, we use the Reciprocal and Quotient Identities to rewrite
. Next, we use the Reciprocal and Quotient Identities to rewrite  and
and  in terms of and :
in terms of and :
![\[ \begin{array}{rcl} \dfrac{2\tan(\theta)}{1 + \tan^{2}(\theta)} & = & \dfrac{2\tan(\theta)}{\sec^{2}(\theta)} \\[0.25in] &=& \dfrac{2 \left( \dfrac{\sin(\theta)}{\cos(\theta)}\right)}{\dfrac{1}{\cos^{2}(\theta)}} \\[0.4in] &=& 2\left( \dfrac{\sin(\theta)}{\cos(\theta)}\right) \cos^{2}(\theta) \\[0.25in] & = & 2\left( \dfrac{\sin(\theta)}{\cancel{\cos(\theta)}}\right) \cancel{\cos(\theta)} \cos(\theta) \\[0.1in] &=& 2\sin(\theta) \cos(\theta) = \sin(2\theta). \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b93029c7559200e23091facc075bc9f3_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.3.4
Express  as a polynomial in terms of
as a polynomial in terms of 
Solution:
Express as a polynomial in terms of .
In Theorem 8.9, one of the formulas for , namely  , expresses as a polynomial in terms of . We are now asked to find such an identity for .
, expresses as a polynomial in terms of . We are now asked to find such an identity for .
Using the sum formula for cosine, we begin with
![\[ \begin{array}{rcl} \cos(3\theta) & = & \cos(2\theta + \theta) \\ [2pt] & = & \cos(2\theta)\cos(\theta) - \sin(2\theta)\sin(\theta). \\ \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-5225d9f78c50ff13f6461c82ce59fe24_l3.png "Rendered by QuickLaTeX.com")
Our ultimate goal is to express the right hand side in terms of only. To that end, we substitute  and
and  which yields:
which yields:
![\[ \begin{array}{rcl} \cos(3\theta) & = & \cos(2\theta)\cos(\theta) - \sin(2\theta)\sin(\theta) \\ [2pt] & = & \left(2\cos^{2}(\theta) - 1\right) \cos(\theta) - \left(2 \sin(\theta) \cos(\theta) \right)\sin(\theta) \\ [2pt] & = & 2\cos^{3}(\theta)- \cos(\theta) - 2 \sin^2(\theta) \cos(\theta) \\ \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e415ab090b33f803e43c6afe726ad5c3_l3.png "Rendered by QuickLaTeX.com")
Finally, we exchange courtesy of the Pythagorean Identity, and get
![\[ \begin{array}{rcl} \cos(3\theta) & = & 2\cos^{3}(\theta)- \cos(\theta) - 2 \sin^2(\theta) \cos(\theta) \\ [2pt] & = & 2\cos^{3}(\theta)- \cos(\theta) - 2 \left(1 - \cos^{2}(\theta)\right) \cos(\theta) \\ [2pt] & = & 2\cos^{3}(\theta)- \cos(\theta) - 2\cos(\theta) + 2\cos^{3}(\theta) \\ [2pt] & = & 4\cos^{3}(\theta)- 3\cos(\theta). \\ \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-097cdb44a10af39ade002d6eb8c8dbdb_l3.png "Rendered by QuickLaTeX.com")
Hence,  .
.
In the last problem in Example 8.2.3, we saw how we could rewrite as sums of powers of . In Calculus, we have occasion to do the reverse; that is, reduce the power of cosine and sine.
Solving the identity for  and the identity
and the identity  for
for  results in the aptly-named `Power Reduction’ formulas below.
results in the aptly-named `Power Reduction’ formulas below.


Our next example is a typical application of Theorem 8.10 that you’ll likely see in Calculus.
Example 8.2.4
Example 8.2.4
Rewrite  as a sum and difference of cosines to the first power.
as a sum and difference of cosines to the first power.
Solution:
We begin with a straightforward application of Theorem 8.10
![\[ \begin{array}{rcl} \sin^{2}(\theta) \cos^{2}(\theta) & = & \left( \dfrac{1 - \cos(2\theta)}{2} \right) \left( \dfrac{1 + \cos(2\theta)}{2} \right) \\ [10pt] & = & \dfrac{1}{4}\left(1 - \cos^{2}(2\theta)\right) \\ [10pt] & = & \dfrac{1}{4} - \dfrac{1}{4}\cos^{2}(2\theta) \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-29cbf0a402ae1a35910259c33c08859a_l3.png "Rendered by QuickLaTeX.com")
Next, we apply the power reduction formula to  to finish the reduction
to finish the reduction
![\[ \begin{array}{rcl} \sin^{2}(\theta) \cos^{2}(\theta) & = & \dfrac{1}{4} - \dfrac{1}{4}\cos^{2}(2\theta) \\ [10pt] & = & \dfrac{1}{4} - \dfrac{1}{4} \left(\dfrac{1 + \cos(2(2\theta))}{2}\right) \\ [10pt] & = & \dfrac{1}{4} - \dfrac{1}{8} - \dfrac{1}{8}\cos(4\theta) \\ [10pt] & = & \dfrac{1}{8} - \dfrac{1}{8}\cos(4\theta) \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a85e8169b46f1717173e9ce09c787e51_l3.png "Rendered by QuickLaTeX.com")
Another application of the Power Reduction Formulas is the Half Angle Formulas. To start, we apply the Power Reduction Formula to 
![\[ \cos^{2}\left(\dfrac{\theta}{2}\right) = \dfrac{1 + \cos\left(2 \left(\frac{\theta}{2}\right)\right)}{2} = \dfrac{1 + \cos(\theta)}{2}.\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-69003ee38b8f42cbf16baa491a8cb9fd_l3.png "Rendered by QuickLaTeX.com")
We can obtain a formula for  by extracting square roots. In a similar fashion, we may obtain a half angle formula for sine, and by using a quotient formula, obtain a half angle formula for tangent.
by extracting square roots. In a similar fashion, we may obtain a half angle formula for sine, and by using a quotient formula, obtain a half angle formula for tangent.
We summarize these formulas below.
Theorem 8.11 Half Angle Formulas
For all applicable angles ,



where the choice of  depends on the quadrant in which the terminal side of
depends on the quadrant in which the terminal side of  lies.
lies.
Example 8.2.5
Example 8.2.5.1
Use a half angle formula to compute the exact value of .
Solution:
Use a half angle formula to compute the exact value of .
To use the half angle formula, we note that  and is a Quadrant I angle, so its cosine is positive. Thus we have
and is a Quadrant I angle, so its cosine is positive. Thus we have
![\[ \begin{array}{rcl} \cos\left(15^{\circ}\right) & = & + \sqrt{\dfrac{1+\cos\left(30^{\circ}\right)}{2}} \\[10pt] &=& \sqrt{\dfrac{1+\frac{\sqrt{3}}{2}}{2}}\\ [10pt] & = & \sqrt{\dfrac{1+\frac{\sqrt{3}}{2}}{2}\cdot \dfrac{2}{2}} \\[10pt] &=& \sqrt{\dfrac{2+\sqrt{3}}{4}} = \dfrac{\sqrt{2+\sqrt{3}}}{2} \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-fb648d87a004d02cd4f0c54349390324_l3.png "Rendered by QuickLaTeX.com")
Back in Example 8.2.1, we found  by using the difference formula for cosine. The reader is encouraged to prove that these two expressions are equal algebraically.
by using the difference formula for cosine. The reader is encouraged to prove that these two expressions are equal algebraically.
Example 8.2.5.2
Suppose  with
with  . Determine
. Determine  .
.
Solution:
Suppose with . Determine .
If , then  , which means
, which means  corresponds to a Quadrant IV angle. Hence,
corresponds to a Quadrant IV angle. Hence,  , so we choose the negative root formula from Theorem 8.11:
, so we choose the negative root formula from Theorem 8.11:
![\[ \begin{array}{rcl} \sin\left(\dfrac{t}{2} \right) & = & -\sqrt{\dfrac{1-\cos\left(t \right)}{2}} \\[10pt] &=& -\sqrt{\dfrac{1- \left(-\frac{3}{5}\right)}{2}}\\ [10pt] & = & -\sqrt{\dfrac{1 + \frac{3}{5}}{2} \cdot \dfrac{5}{5}} \\[10pt] &=& -\sqrt{\dfrac{8}{10}} \\[10pt] & =& -\dfrac{2\sqrt{5}}{5} \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-55aef44772eb7e5a2fc5b9bd1f28bc39_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.5.3
Use the identity given in number 3 of Example 8.2.3 to derive the identity
![\[\tan\left(\dfrac{\theta}{2}\right) = \dfrac{\sin(\theta)}{1+\cos(\theta)}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-06bdab1b057fff89c7b64610cb50ef48_l3.png "Rendered by QuickLaTeX.com")
Solution:
Use the identity given in number 3 of Example 8.2.3 to derive the identity  .
.
Instead of our usual approach to verifying identities, namely starting with one side of the equation and trying to transform it into the other, we will start with the identity we proved in number 3 of Example 8.2.3 and manipulate it into the identity we are asked to prove.
The identity we are asked to start with is  . If we are to use this to derive an identity for
. If we are to use this to derive an identity for  , it seems reasonable to proceed by replacing each occurrence of with
, it seems reasonable to proceed by replacing each occurrence of with 
![\[ \begin{array}{rcl} \sin\left(2 \left(\frac{\theta}{2}\right)\right) & = & \dfrac{2\tan\left(\frac{\theta}{2}\right)}{1 + \tan^{2}\left(\frac{\theta}{2}\right)} \\ [15pt] \sin(\theta) & = & \dfrac{2\tan\left(\frac{\theta}{2}\right)}{1 + \tan^{2}\left(\frac{\theta}{2}\right)} \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e80dc2cf1eb1bc1fd0a23166a55ebf1c_l3.png "Rendered by QuickLaTeX.com")
We now have the we need, but we somehow need to get a factor of  involved. We substitute
involved. We substitute  , and continue to manipulate our given identity by converting secants to cosines.
, and continue to manipulate our given identity by converting secants to cosines.
![\[ \begin{array}{rcl} \sin(\theta) & = & \dfrac{2\tan\left(\frac{\theta}{2}\right)}{1 + \tan^{2}\left(\frac{\theta}{2}\right)} \\ [15pt] \sin(\theta) & = & \dfrac{2\tan\left(\frac{\theta}{2}\right)}{\sec^{2}\left(\frac{\theta}{2}\right)} \\ [15pt] \sin(\theta) & = & 2 \tan\left(\frac{\theta}{2}\right) \cos^{2}\left(\frac{\theta}{2}\right) \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-bc04fbb1e0c9a7e6df2c1cd56a7fbf4c_l3.png "Rendered by QuickLaTeX.com")
Finally, we apply a power reduction formula, and then solve for 
![\[ \begin{array}{rcl} \sin(\theta) & = & 2 \tan\left(\frac{\theta}{2}\right) \cos^{2}\left(\frac{\theta}{2}\right) \\ [5pt] \sin(\theta) & = & 2 \tan\left(\frac{\theta}{2}\right) \left(\dfrac{1 + \cos\left(2 \left(\frac{\theta}{2}\right)\right)}{2}\right) \\ [15pt] \sin(\theta) & = & \tan\left(\frac{\theta}{2}\right) \left(1+\cos(\theta) \right) \\ [5pt] \tan\left(\dfrac{\theta}{2}\right) & = & \dfrac{\sin(\theta)}{1+\cos(\theta)} \\ \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f0340ab198971632fbf51b79952159e7_l3.png "Rendered by QuickLaTeX.com")
Our next batch of identities, the Product to Sum Formulas,[5] are easily verified by expanding each of the right hand sides in accordance with Theorem 8.8 and as you should expect by now we leave the details as exercises. They are of particular use in Calculus, and we list them here for reference.
![\cos(\alpha)\cos(\beta) = \frac{1}{2} \left[ \cos(\alpha - \beta) + \cos(\alpha + \beta)\right]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-00d1c1f22495d40ba66f78cafd99ed1a_l3.png "Rendered by QuickLaTeX.com")
![\sin(\alpha)\sin(\beta) = \frac{1}{2} \left[ \cos(\alpha - \beta) - \cos(\alpha + \beta)\right]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4bf188be20b0c9d58f392c187762c49f_l3.png "Rendered by QuickLaTeX.com")
![\sin(\alpha)\cos(\beta) = \frac{1}{2} \left[ \sin(\alpha - \beta) + \sin(\alpha + \beta)\right]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-fe5e5d5aea65f2f670703e03910d3889_l3.png "Rendered by QuickLaTeX.com")
Related to the Product to Sum Formulas are the Sum to Product Formulas, which we will have need of in Section 8.3.2. These are essentially restatements of the Product to Sum Formulas (by re-labeling the arguments of the sine and cosine functions) and as such, their proofs are left as exercises.



Example 8.2.6
Example 8.2.6.1
Write  as a sum.
as a sum.
Solution:
Write as a sum.
Identifying  and
and  , we find
, we find
![\[\begin{array}{rcl} \cos(2\theta)\cos(6\theta) & = & \frac{1}{2} \left[ \cos(2\theta - 6\theta) + \cos(2\theta + 6\theta)\right]\\ [4pt] & = & \frac{1}{2} \cos(-4\theta) + \frac{1}{2}\cos(8\theta) \\ [4pt] & = & \frac{1}{2} \cos(4\theta) + \frac{1}{2} \cos(8\theta), \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e33a2397f8bdf6d5c805249c16ea3c41_l3.png "Rendered by QuickLaTeX.com")
where the last equality is courtesy of the even identity for cosine,  .
.
Example 8.2.6.2
Write  as a product.
as a product.
Solution:
Write as a product.
Identifying  and
and  yields
yields
![\[ \begin{array}{rcl} \sin(\theta) - \sin(3\theta) & = & 2 \sin\left( \dfrac{\theta - 3\theta}{2}\right)\cos\left( \dfrac{\theta + 3\theta}{2}\right) \\ [2pt] & = & 2 \sin\left( -\theta \right)\cos\left( 2\theta \right) \\ [2pt] & = & -2 \sin\left( \theta \right)\cos\left( 2\theta \right), \\ \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a9d4c4aeff8b9d734370278279a26f6f_l3.png "Rendered by QuickLaTeX.com")
where the last equality is courtesy of the odd identity for sine, .
The reader is reminded that all of the identities presented in this section which regard the circular functions as functions of angles (in radian measure) apply equally well to the circular (trigonometric) functions regarded as functions of real numbers.
8.2.1 Sinusoids, Revisted
We first studied sinusoids in Section 7.3. Using the sum formulas for sine and cosine, we can expand the forms given to us in Theorem 7.7:
![\[ S(t) = A \sin(B t + C) + D = A\sin(B t) \cos(C) + A \cos(B t)\sin(C) + D,\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e907aff0dc7c82b0ce5a9a728b86246f_l3.png "Rendered by QuickLaTeX.com")
and
![\[E(t) = A \cos(B t + C) + D = A\cos(B t) \cos(C) - A \sin(B t) \sin(C) + B.\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-219f8352acab960535a9932e082b6ec1_l3.png "Rendered by QuickLaTeX.com")
As we’ll see in the next example, recognizing these `expanded’ forms of sinusoids allows us to graph functions as sinusoids which, at first glance, don’t appear to fit the forms of either  or
or  .
.
Example 8.2.7
Example 8.2.7.1
Consider the function  .
.
Write a formula for  in the form
in the form  for
for  .
.
Check your answers analytically using identities.
Solution:
Write a formula for in the form for .
The key to this problem is to use the expanded forms of the sinusoid formulas and match up corresponding coefficients. We start by equating with the expanded form of :
![\[\cos(2t) - \sqrt{3} \sin(2t) = A\cos(B t) \cos(C) - A \sin(Bt) \sin(C) + D\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e0f6ee893fd78be0b611153a94f15e67_l3.png "Rendered by QuickLaTeX.com")
If we take  and
and  , we get:
, we get:
![\[\cos(2t) - \sqrt{3} \sin(2t) = A\cos(2t) \cos(C) - A \sin(2t)\sin(C)\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-5398ea81b2108fcd478166ebe523df16_l3.png "Rendered by QuickLaTeX.com")
To determine and  , a bit more work is involved. We get started by equating the coefficients of the trigonometric functions on either side of the equation.
, a bit more work is involved. We get started by equating the coefficients of the trigonometric functions on either side of the equation.
On the left hand side, the coefficient of  is
is  , while on the right hand side, it is
, while on the right hand side, it is  . As this equation is to hold for all real numbers, we must have that
. As this equation is to hold for all real numbers, we must have that  .
.
Similarly, we find by equating the coefficients of  that
that  . In conjunction with , we have a system of two (nonlinear) equations and two unknowns.
. In conjunction with , we have a system of two (nonlinear) equations and two unknowns.
As usual, our first task is to reduce this system of two equations and two unknowns to one equation and one unknown. We can temporarily eliminate the dependence on by using a Pythagorean Identity. From  , we multiply through by
, we multiply through by  to get
to get  .
.
In our case, and , hence
![\[ \begin{array}{rcl} A^2 &=& A^2\cos^{2}(C) + A^2\sin^{2}(C) \\[4pt] &=& 1^2 + (\sqrt{3})^2 = 4 \\[4pt] A &=& \pm 2 \end{array} \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-9d10ecb6845305c1759fb085f7873e1a_l3.png "Rendered by QuickLaTeX.com")
We can choose  , and then find associated with this choice[6].
, and then find associated with this choice[6].
Substituting  into our two equations, and , we get
into our two equations, and , we get  and
and  . After some rearrangement,
. After some rearrangement,  and
and  . One such angle which satisfies this criteria is
. One such angle which satisfies this criteria is  .
.
Hence, one way to write as a sinusoid is  .
.
We can check our answer using the sum formula for cosine :
![\[\begin{array}{rcl} f(t) & = & 2 \cos\left(2t + \frac{\pi}{3}\right) \\ [3pt] & = & 2 \left[ \cos(2t) \cos\left(\frac{\pi}{3}\right) - \sin(2t) \sin\left(\frac{\pi}{3}\right) \right]\\ [3pt] & = & 2 \left[ \cos(2t) \left(\frac{1}{2}\right) - \sin(2t) \left(\frac{\sqrt{3}}{2}\right)\right] \\ [3pt] & = & \cos(2t) - \sqrt{3} \sin(2t). \\ \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a72683a77650fbab611c8d3fb6fc9c4e_l3.png "Rendered by QuickLaTeX.com")
Example 8.2.7.2
Consider the function .
Write a formula for in the form  for .
for .
Check your answers analytically using identities.
Solution:
Write a formula for in the form for .
Proceeding as before, we equate with the expanded form of of the sinusoid  to get:
to get:
![\[\cos(2t) - \sqrt{3} \sin(2t) = A\sin(Bt) \cos(C) + A \cos(Bt)\sin(C) + D \]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-04aa28def62fb67ccb069d9870e1352d_l3.png "Rendered by QuickLaTeX.com")
Taking  and , we get
and , we get  . We equate[7] the coefficients of on either side and get
. We equate[7] the coefficients of on either side and get  and
and  .
.
Using as before, we get  , and again we choose .
, and again we choose .
This means  , or
, or  , and
, and  , so
, so  . One such angle which meets these criteria is
. One such angle which meets these criteria is  .
.
Hence, we have  .
.
Checking our work analytically, we have
![\[\begin{array}{rcl} f(t) & = & 2 \sin\left(2t + \frac{5\pi}{6}\right) \\ [3pt] & = & 2 \left[ \sin(2t) \cos\left(\frac{5\pi}{6}\right) + \cos(2t) \sin\left(\frac{5\pi}{6}\right) \right]\\ [3pt] & = & 2 \left[ \sin(2t) \left(-\frac{\sqrt{3}}{2}\right) + \cos(2t) \left(\frac{1}{2}\right)\right] \\ [3pt] & = & \cos(2t) - \sqrt{3} \sin(2t) \\[-1.5em] \end{array}\]](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4b24bdafe8f46c8e569afa5d6cdb7c13_l3.png "Rendered by QuickLaTeX.com")
A couple of remarks about Example 8.2.7 are in order. First, had we chosen  instead of as we worked through Example 8.2.7, our final answers would have looked different. The reader is encouraged to rework Example 8.2.7 using to see what these differences are, and then for a challenging exercise, use identities to show that the formulas are all equivalent.[8]
instead of as we worked through Example 8.2.7, our final answers would have looked different. The reader is encouraged to rework Example 8.2.7 using to see what these differences are, and then for a challenging exercise, use identities to show that the formulas are all equivalent.[8]
It is important to note that in order for the technique presented in Example 8.2.7 to fit a function into one of the forms in Theorem 7.7, the frequencies of the sine and cosine terms must match. For example, in the Exercises, you’ll be asked to write  in the form of and
in the form of and  above, and because both the sine and cosine terms have frequency , this is possible.
above, and because both the sine and cosine terms have frequency , this is possible.
However, a function such as  cannot be written in the form of or . The quickest way to see this is to examine its graph below which is decidedly not a sinusoid. That being said, we can still analyze this curve using identities.
cannot be written in the form of or . The quickest way to see this is to examine its graph below which is decidedly not a sinusoid. That being said, we can still analyze this curve using identities.
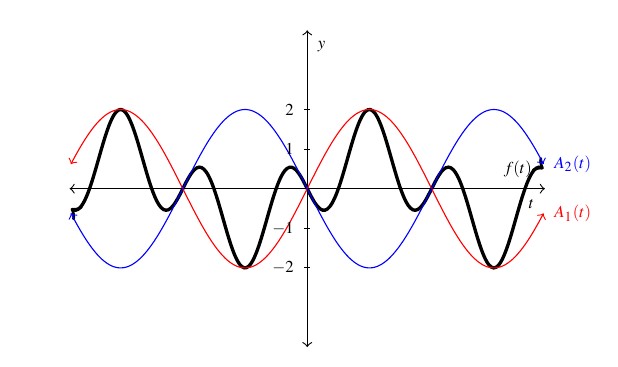
Using our result from number 2 Example 8.2.6, we may rewrite  . Grouping factors, we can view
. Grouping factors, we can view ![f(t) = [ -2 \sin(t) ] \cos(2t) = A(t) \cos(2t)](https://pressbooks.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-59fddb8904ce6a5a1ffa130eec6be758_l3.png "Rendered by QuickLaTeX.com") as the curve
as the curve  with a variable amplitude,
with a variable amplitude,  .
.
Overlaying the graphs of with the (dashed) graphs of  and
and  , we can see the role these two curves play in the graph of
, we can see the role these two curves play in the graph of  . They create a kind of `wave envelope’ for the graph of . This is an example of the beats phenomenon. Note that when written as a product of sinusoids, it is always the lower frequency factor which creates the `wave-envelope’ of the curve.
. They create a kind of `wave envelope’ for the graph of . This is an example of the beats phenomenon. Note that when written as a product of sinusoids, it is always the lower frequency factor which creates the `wave-envelope’ of the curve.
Note that in order to rewrite a sum or difference of sine and cosine functions with different frequencies into a product using the sum to product identities, Theorem 8.13, we need the amplitudes of each term to be the same. We explore more examples of these functions and this behavior in the Exercises.
8.2.2 Section Exercises
In Exercises 1 – 6, use the Even / Odd Identities to verify the identity. Assume all quantities are defined.






In Exercises 7 – 21, use the Sum and Difference Identities to find the exact value. You may have need of the Quotient, Reciprocal or Even/Odd Identities as well.















- If is a Quadrant IV angle with
 , and
, and  , where
, where  , find
, find
- If
 , where
, where  , and is a Quadrant II angle with
, and is a Quadrant II angle with  , find
, find
- If , where , and
 where
where  , find
, find
- If
 , where
, where  , and
, and  , where
, where  , find
, find





In Exercises 26 – 35, use Example 8.2.7 as a guide to show that the function is a sinusoid by rewriting it in the forms  and
and  for
for  and
and  .
.









- In Exercises 26 – 35, you should have noticed a relationship between the phases for the and . Show that if
 , then
, then  where
where  .
. - Let be an angle measured in radians and let
 be a point on the terminal side of when it is drawn in standard position. Use Theorem 7.4 and the sum identity for sine in Theorem 8.7 to show that
be a point on the terminal side of when it is drawn in standard position. Use Theorem 7.4 and the sum identity for sine in Theorem 8.7 to show that  (with ) can be rewritten as
(with ) can be rewritten as  .
. - Two (seemingly) different formulas to model the hours of daylight are given here,
 :
:  and
and  . Use the difference identities for sine to expand
. Use the difference identities for sine to expand  and
and  . How different are they?
. How different are they?
In Exercises 39 – 53, verify the identity.[9]















In Exercises 54 – 63, use the Half Angle Formulas to find the exact value. You may have need of the Quotient, Reciprocal or Even/Odd Identities as well.
- (compare with Exercise 7)
- (compare with Exercise 9)



 (compare with Exercise 16)
(compare with Exercise 16) (compare with Exercise 18)
(compare with Exercise 18)


In Exercises 64 – 73, use the given information about to compute the exact values of

 where
where 
 where
where 
 where
where 
 where
where 
 where
where  where
where  where
where  where
where  where
where  where
where
In Exercises 74 – 88, verify the identity. Assume all quantities are defined.











 (HINT: Use the result to 84.)
(HINT: Use the result to 84.)


- Suppose is a Quadrant I angle with . Verify the following formulas
- Discuss with your classmates how each of the formulas, if any, in Exercise 89 change if we change assume is a Quadrant II, III, or IV angle.
- Suppose is a Quadrant I angle with
 . Verify the following formulas
. Verify the following formulas
- Discuss with your classmates how each of the formulas, if any, in Exercise 91 change if we change assume is a Quadrant II, III, or IV angle.
- If
 for
for  , find an expression for
, find an expression for  in terms of .
in terms of . - If for
 , find an expression for in terms of .
, find an expression for in terms of . - If
 where is a Quadrant II angle, find an expression for in terns of .
where is a Quadrant II angle, find an expression for in terns of . - If
 for , find an expression for in terms of .
for , find an expression for in terms of . - If
 for , find an expression for in terms of .
for , find an expression for in terms of . - If
 for
for  , find an expression for
, find an expression for  in terms of .
in terms of . - Show that
 for all .
for all . - Let be a Quadrant III angle with
 . Show that this is not enough information to determine the sign of
. Show that this is not enough information to determine the sign of  by first assuming
by first assuming  and then assuming and computing in both cases.
and then assuming and computing in both cases. - Without using your calculator, show that
 .
. - In part 4 of Example 8.2.3, we wrote as a polynomial in terms of . In Exercise 84, we had you verify an identity which expresses
 as a polynomial in terms of . Can you find a polynomial in terms of for
as a polynomial in terms of . Can you find a polynomial in terms of for  ?
?  ? Can you find a pattern so that
? Can you find a pattern so that  could be written as a polynomial in cosine for any natural number
could be written as a polynomial in cosine for any natural number  ?
? - In Exercise 80, we has you verify an identity which expresses
 as a polynomial in terms of . Can you do the same for
as a polynomial in terms of . Can you do the same for  ? What about for
? What about for  ? If not, what goes wrong?
? If not, what goes wrong?






In Exercises 104 – 109, verify the identity by graphing the right and left hand using a graphing utility.






In Exercises 110 – 115, write the given product as a sum. Note: you may need to use an Even/Odd Identity to match the answer provided.






In Exercises 116 – 121, write the given sum as a product. Note: you may need to use an Even/Odd or Cofunction Identity to match the answer provided.






In Exercises 122 – 125, using the remarks following Example 8.2.7 as a guide, rewrite the given function as a product of sinusoids. Identify the functions which create the `wave envelope.’ Check your answer by graphing the function along with the `wave-envelope’ using a graphing utility.




- Verify the Even / Odd Identities for tangent, secant, cosecant and cotangent.
- Verify the Cofunction Identities for tangent, secant, cosecant and cotangent.
- Verify the Difference Identities for sine and tangent.
- Verify the Product to Sum Identities.
- Verify the Sum to Product Identities.
- In the picture we've drawn, the triangles and are congruent, which is even better. However,
 could be or it could be
could be or it could be  , neither of which makes a triangle. It could also be larger than , which makes a triangle, just not the one we've drawn. You should think about those three cases. ↵
, neither of which makes a triangle. It could also be larger than , which makes a triangle, just not the one we've drawn. You should think about those three cases. ↵ - It takes some trial and error to find this combination. One alternative is to convert to degrees
 ↵
↵ - Note that even though , we cannot take
 and
and  . Recall that and are the
. Recall that and are the  and coordinates on a specific circle, the Unit Circle. As we'll see shortly,
and coordinates on a specific circle, the Unit Circle. As we'll see shortly,  lies on a circle of
lies on a circle of  , so not the Unit Circle. ↵
, so not the Unit Circle. ↵ - We invite the reader to check this answer using the other two formulas. ↵
- These are also known as the Prosthaphaeresis Formulas and have a rich history. The authors recommend that you conduct some research on them as your schedule allows. ↵
- Remember choosing
 results in a different but equally correct phase shift. ↵
results in a different but equally correct phase shift. ↵ - Be careful here! ↵
- The general equations to fit a function of the form
 into one of the forms in Theorem 7.7 are explored in Exercise 36. ↵
into one of the forms in Theorem 7.7 are explored in Exercise 36. ↵ - Note: numbers 39 and 40 are the conversion formulas stated in Theorem 7.6 in Section 7.3. ↵
